| [1] |
DIMITROV T, KREISBECK C, BECKER J S, et al. Autonomous molecular design: then and now[J]. ACS Applied Materials & Interfaces, 2019, 11(28): 24 825-24 836.
|
| [2] |
SZYMKUĆ S, GAJEWSKA E P, KLUCZNIK T, et al. Computer-assisted synthetic planning: the end of the beginning[J]. Angewandte Chemie International Edition, 2016, 55(20): 5904-5937.
doi: 10.1002/anie.v55.20
|
| [3] |
KOWALIK M, GOTHARD C M, DREWS A M, et al. Parallel optimization of synthetic pathways within the network of organic chemistry[J]. Angewandte Chemie International Edition, 2012, 51(32): 7928-7932.
doi: 10.1002/anie.v51.32
|
| [4] |
SEGLER M H, PREUSS M, WALLER M P. Planning chemical syntheses with deep neural networks and symbolic AI[J]. Nature, 2018, 555(7698): 604-610.
doi: 10.1038/nature25978
|
| [5] |
晋良海, 王李成, 陈云, 等. 视觉信息驱动的起重作业操作行为响应特性研究[J]. 中国安全科学学报, 2022, 32(4): 198-204.
doi: 10.16265/j.cnki.issn1003-3033.2022.04.029
|
|
JIN Lianghai, WANG Licheng, CHEN Yun, et al. Response characteristics of lifting operation driven by visual information[J]. China Safety Science Journal, 2022, 32(4): 198-204.
doi: 10.16265/j.cnki.issn1003-3033.2022.04.029
|
| [6] |
刘耀, 焦双健. ST-GCN在建筑工人不安全动作识别中的应用[J]. 中国安全科学学报, 2022, 32(4): 30-35.
doi: 10.16265/j.cnki.issn1003-3033.2022.04.005
|
|
LIU Yao, JIAO Shuangjian. Application of ST-GCN in unsafe action identification of construction workers[J]. China Safety Science Journal, 2022, 32(4): 30-35.
doi: 10.16265/j.cnki.issn1003-3033.2022.04.005
|
| [7] |
BURGER B, MAFFETTONE P M, GUSEV V V, et al. A mobile robotic chemist[J]. Nature, 2020, 583(7815): 237-241.
doi: 10.1038/s41586-020-2442-2
|
| [8] |
PERERA D, TUCKER J W, BRAHMBHATT S, et al. A platform for automated nanomole-scale reaction screening and micromole-scale synthesis in flow[J]. Science, 2018, 359(6374): 429-434.
doi: 10.1126/science.aap9112
pmid: 29371464
|
| [9] |
MEHR S H M, CRAVEN M, LEONOV A I, et al. A universal system for digitization and automatic execution of the chemical synthesis literature[J]. Science, 2020, 370(6512): 101-108.
doi: 10.1126/science.abc2986
pmid: 33004517
|
| [10] |
KLUCZNIK T, MIKULAK-KLUCZNIK B, MCCORMACK M P, et al. Efficient syntheses of diverse, medicinally relevant targets planned by computer and executed in the laboratory[J]. Chem, 2018, 4(3): 522-532.
doi: 10.1016/j.chempr.2018.02.002
|
| [11] |
GRANDA J M, DONINA L, DRAGONE V, et al. Controlling an organic synthesis robot with machine learning to search for new reactivity[J]. Nature, 2018, 559(7714): 377-381.
doi: 10.1038/s41586-018-0307-8
|
| [12] |
STEINER S, WOLF J, GLATZEL S, et al. Organic synthesis in a modular robotic system driven by a chemical programming language[J]. Science, 2019, 363(6423): DOI: 10.1126/science.aav2211.
doi: 10.1126/science.aav2211
|
| [13] |
BURGER B, MAFFETTONE P M, GUSEV V V, et al. A mobile robotic chemist[J]. Nature, 2020, 583(7815): 237-241.
doi: 10.1038/s41586-020-2442-2
|
| [14] |
RAMíREZ M G, RINCON J C V, PARADA J F L. Liquid level control of Coca-Cola bottles using an automated system[C]. 2014 International Conference on Electronics, Communications and Computers (CONIELECOMP), 2014:148-154.
|
| [15] |
FENG Fujian, WANG Lin, ZHANG Qian, et al. Liquid surface location of milk bottle based on digital image processing[C]. Multimedia and Signal Processing: Second International Conference, 2012:232-239.
|
| [16] |
LEY S, INGHAM R, O'BRIEN M, et al. Camera-enabled techniques for organic synthesis[J]. Beilstein Journal of Organic Chemistry, 2013, 9(1): 1051-1072.
doi: 10.3762/bjoc.9.118
|
| [17] |
徐红伟, 柯海森, 万延见, 等. 分区确认的机器视觉视镜分液识别控制装置和方法:中国, CN111389323A[P]. 2020-07-10.
|
| [18] |
SHANNON C E. A mathematical theory of communication[J]. The Bell System Technical Journal, 1948, 27(3): 379-423.
doi: 10.1002/bltj.1948.27.issue-3
|
| [19] |
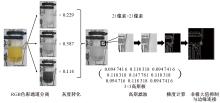
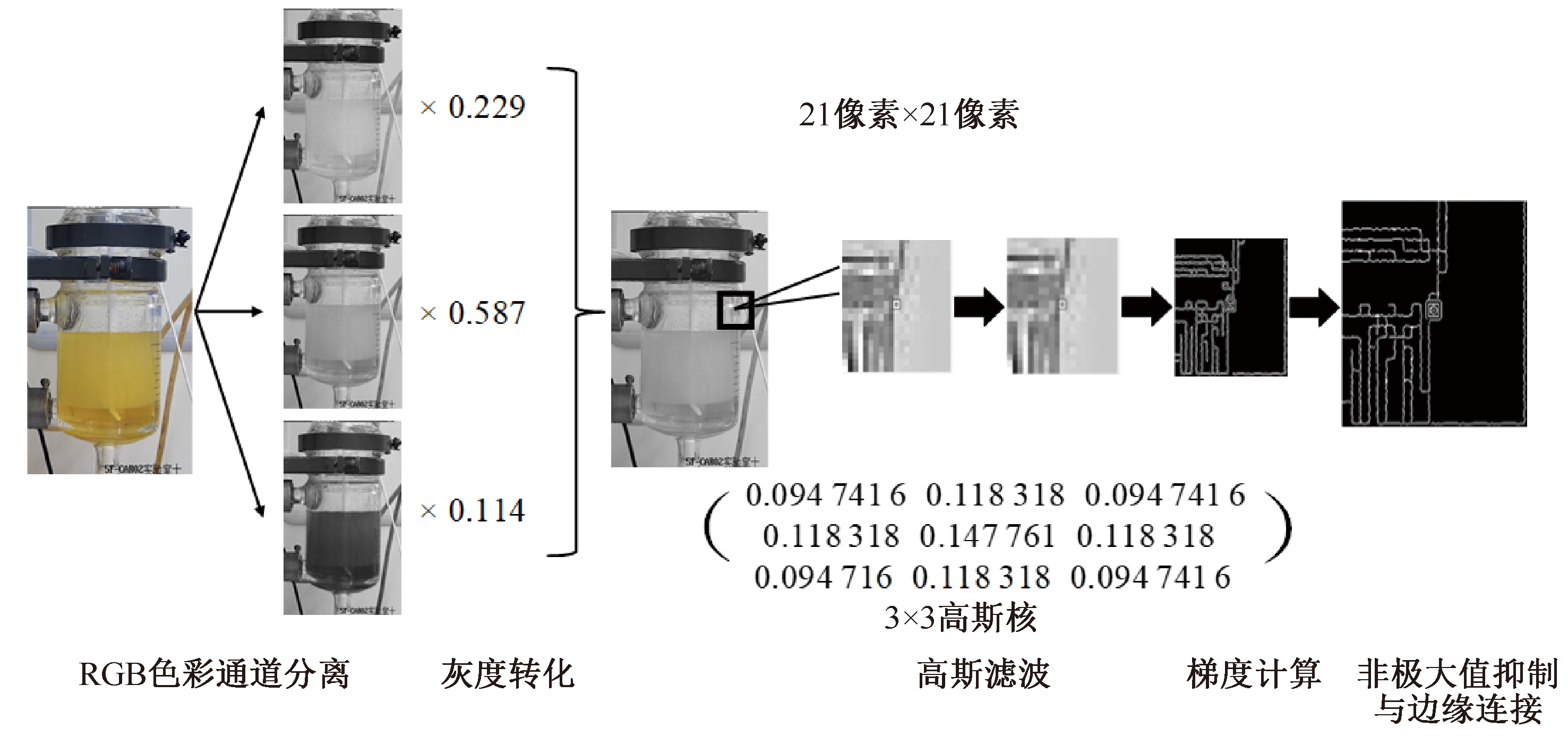
CANNY J. A computational approach to edge detection[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 1986, 11(6): 679-698.
|
| [20] |
EPPEL S, XU Haoping, BISMUTH M, et al. Computer vision for recognition of materials and vessels in chemistry lab settings and the vector-labpics data set[J]. ACS Central Science, 2020, 6(10):1743-1752.
doi: 10.1021/acscentsci.0c00460
pmid: 33145411
|
| [21] |
SHEN Jun, CASTAN S. An optimal linear operator for step edge detection[J]. CVGIP: Graphical Models and Image Processing, 1992, 54(2): 112-133.
doi: 10.1016/1049-9652(92)90060-B
|

 ), 祝模芮3,4, 孔新淋2, 彭焕庆2, 彭伟2, 张浩2,3,**(
), 祝模芮3,4, 孔新淋2, 彭焕庆2, 彭伟2, 张浩2,3,**( 京公网安备 11010502045206号
京公网安备 11010502045206号