中国安全科学学报 ›› 2024, Vol. 34 ›› Issue (7): 170-177.doi: 10.16265/j.cnki.issn1003-3033.2024.07.0141
向巍1( ), 吴绍斌2,3, 林绪泽2, 闫泽新2, 张明4
), 吴绍斌2,3, 林绪泽2, 闫泽新2, 张明4
XIANG Wei1(), WU Shaobin2,3, LIN Xuze2, YAN Zexin2, ZHANG Ming4
摘要:
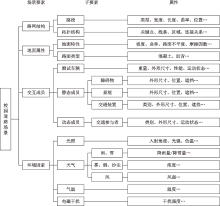
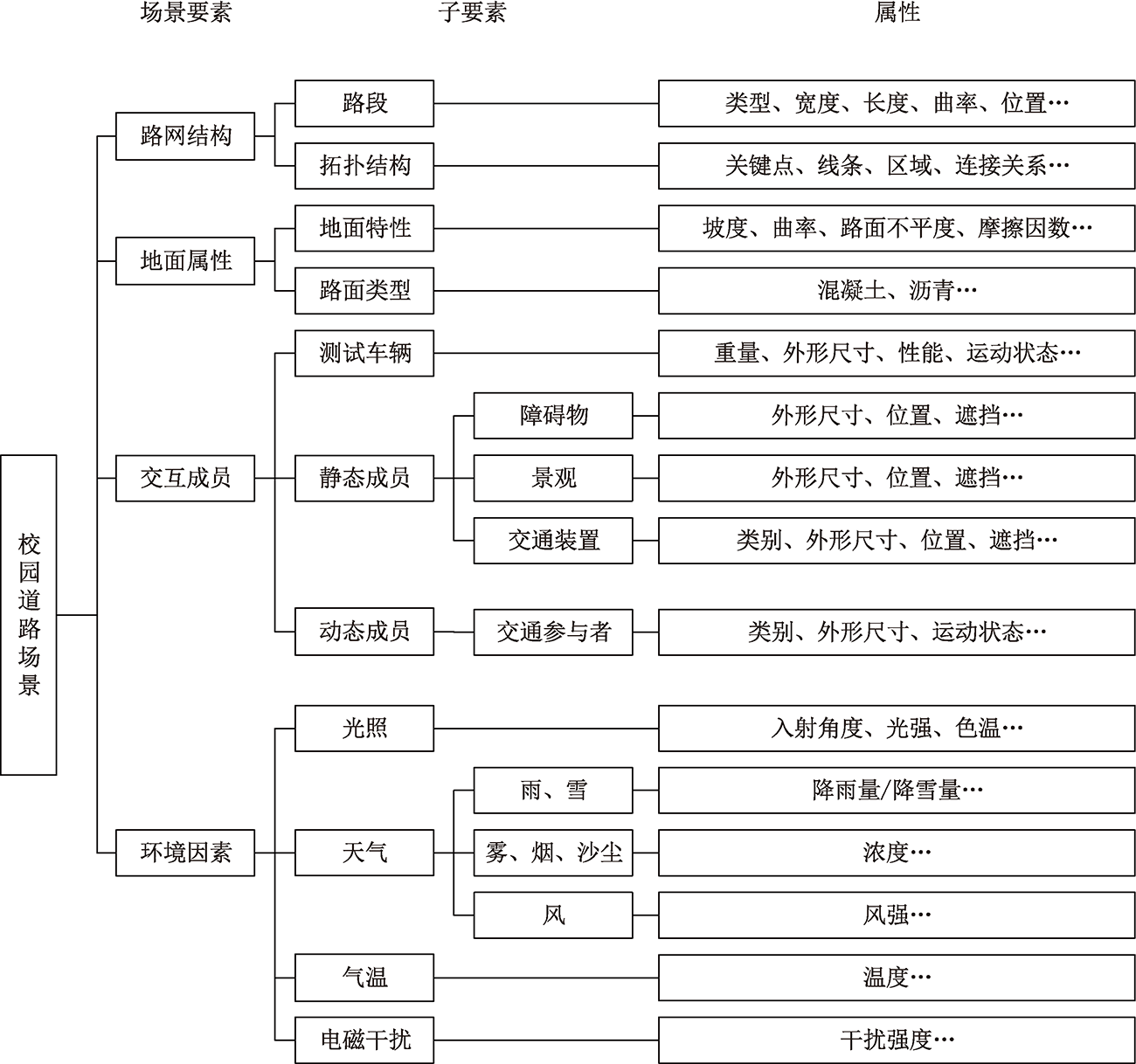
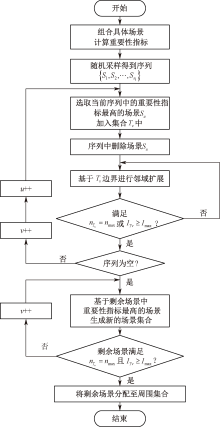
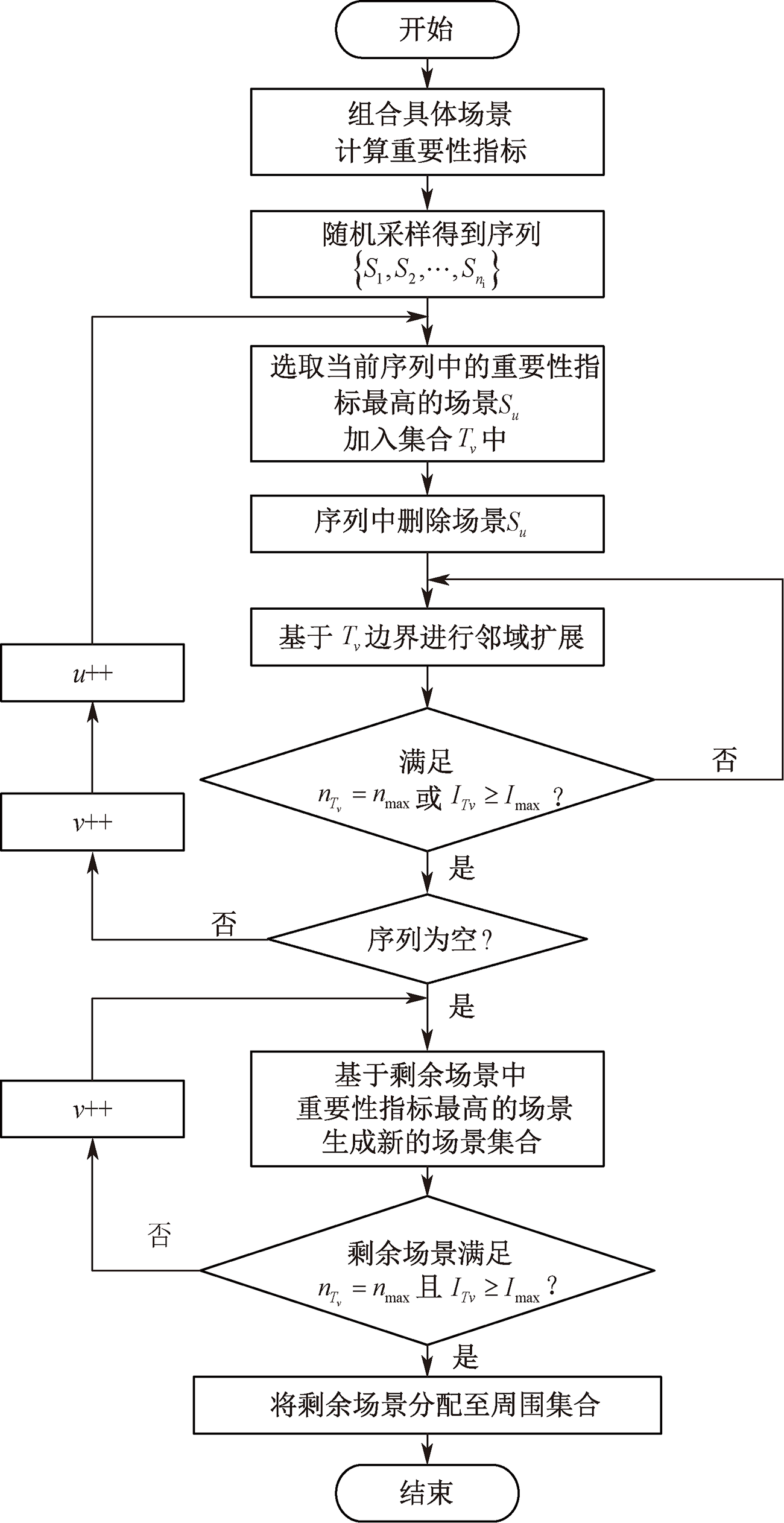
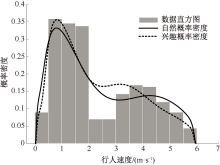
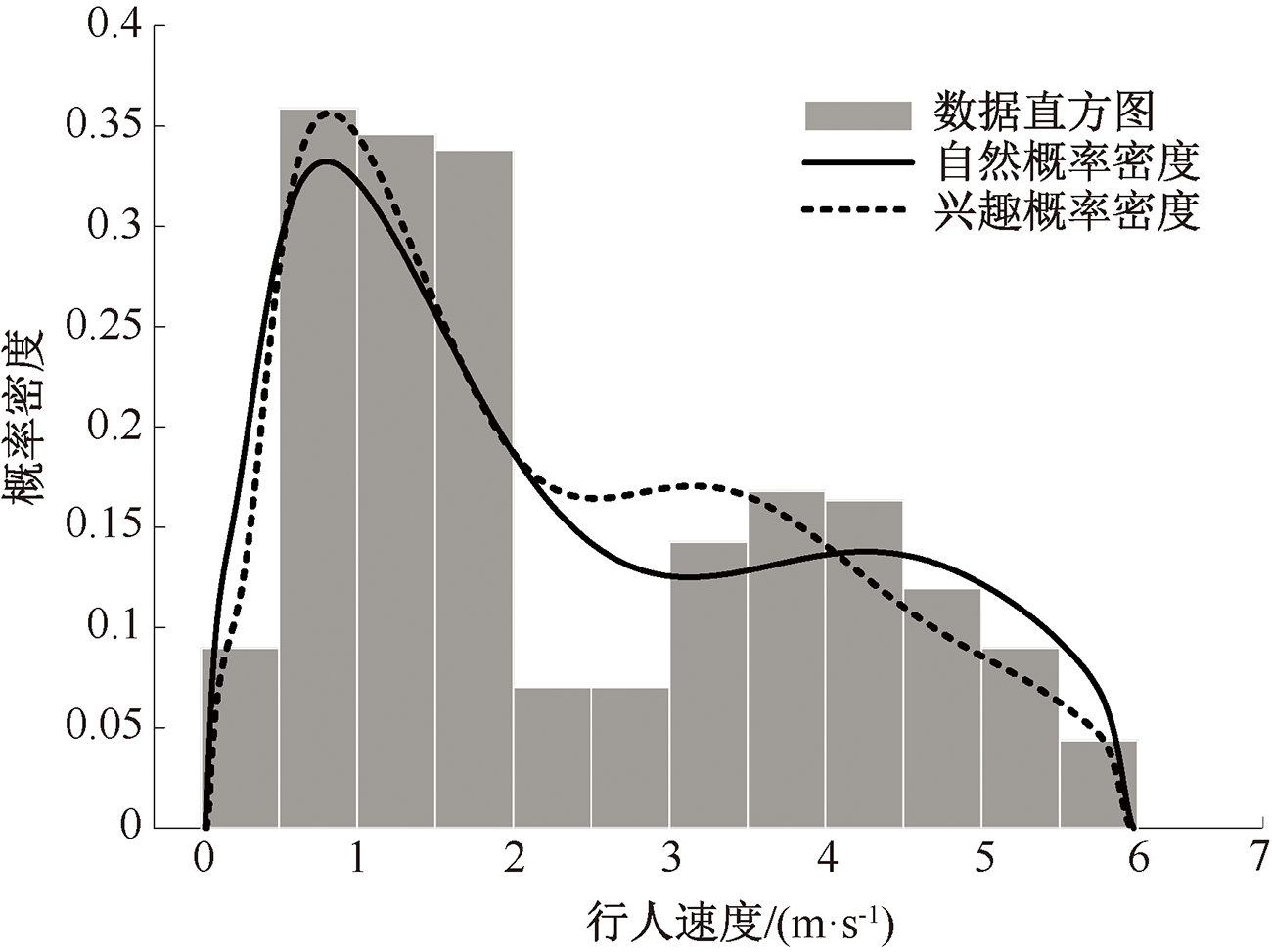
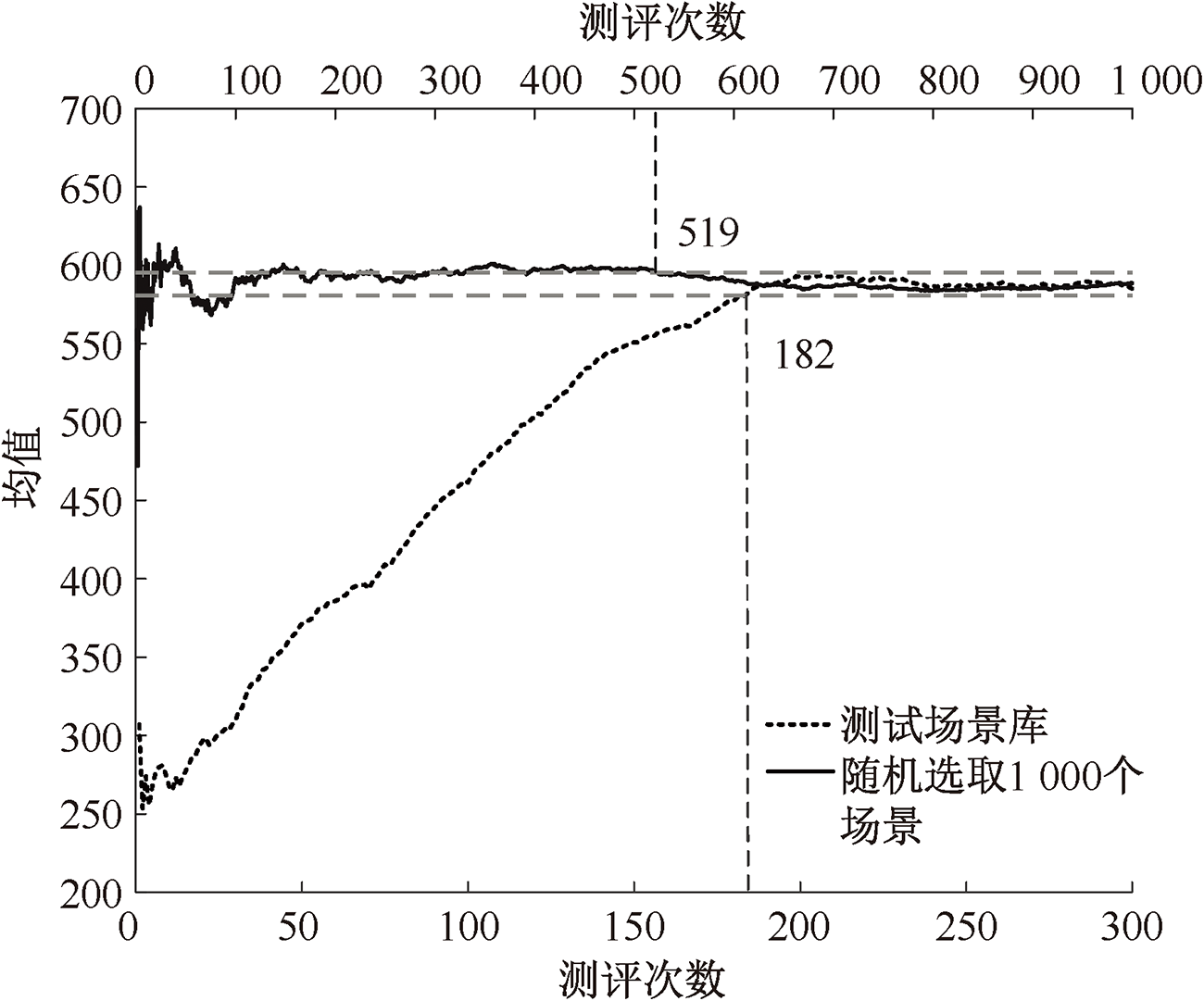
为加快无人驾驶系统测试的速度和效率,提出校园环境无人驾驶场景库的生成方法。首先,将校园道路场景简化为路网结构、地面属性、交互成员、环境因素的组合,分析校园复杂环境的仿真测试场景;其次,针对测试场景库局限性较强的问题,提出基于重要性指标的场景库生成方法;然后,采用复杂度指标和兴趣概率指标描述场景重要性指标,应用模糊层次分析法(FAHP)评估场景复杂度,并结合核密度估计方法和感兴趣权重计算场景兴趣概率;再次,分割参数空间获取相似场景集合,并按照测试优先度和重要性指标对场景集合排序,逐步添加筛选出的场景到测试场景库中,生成带有测试序列的场景库;最后,在基于真实环境下的校园环境道路数据生成的测试场景库中进行测试评价,验证场景库生成方法的有效性。结果表明:采用4种场景要素和树形结构能够有效描述校园测试场景,基于重要性指标的校园场景库生成方法能够生成高测试效率、高覆盖度、吻合自然概率及兴趣区间的校园测试场景库,能够提高校园复杂环境无人驾驶仿真测试的效率。
中图分类号:
 京公网安备 11010502045206号
京公网安备 11010502045206号