| [1] |
NHTSA. Traffic safety facts 2001[R], 2002.
|
| [2] |
孟祥海, 林兰平. 高速公路分合流区潜在事故风险研究[J]. 中国安全科学学报, 2015, 25(8):164-170.
|
|
MENG Xianghai, LIN Lanping. Research on potential crash risk in freeway mering and diverging areas[J]. China Safety Science Journal, 2015, 25(8):164-170.
|
| [3] |
冯嵩, 钱宇彬, 曲现国, 等. 基于安全距离的雾天车辆换道轨迹模型[J]. 中国安全科学学报, 2022, 32(7):165-171.
doi: 10.16265/j.cnki.issn1003-3033.2022.07.1182
|
|
FENG Song, QIAN Yubin, QU Xianguo, et al. Vehicle lane-changing trajectory model in foggy weather based on safety distance[J]. China Safety Science Journal, 2022, 32(7):165-171.
doi: 10.16265/j.cnki.issn1003-3033.2022.07.1182
|
| [4] |
王建强, 吴剑, 李洋. 基于人-车-路协同的行车风险场概念、原理及建模[J]. 中国公路学报, 2016, 29(1):105-114.
|
|
WANG Janqiang, WU Jian, LI Yang. Concept, principle and modeling of driving risk field based on driver-vehicle-road interaction[J]. China Journal of Highway and Transport, 2016, 29(1):105-114.
|
| [5] |
LI Linheng, GAN Jing, JI Xinkai, et al. Dynamic driving risk potential field model under the connected and automated vehicles environment and its application in car-following modeling[J]. IEEE Transactions on Intelligent Transportation Systems, 2020, 23(1): 122-141.
|
| [6] |
安林芳, 陈涛, 成艾国, 等. 基于人工势场算法的智能车辆路径规划仿真[J]. 汽车工程, 2017, 39(12):1451-1456.
|
|
AN Linfang, CHEN Tao, CHENG Aiguo, et al. A simulation on the path planning of intelligent vehicles based on a.pngicial potential field algorithm[J]. Automotive Engineering, 2017, 39(12):1451-1456.
|
| [7] |
朱乃宣, 高振海, 胡宏宇, 等. 基于交通风险评估的个性化换道触发研究[J]. 汽车工程, 2021, 43(9):1314-1321.
|
|
ZHU Naixuan, GAO Zhenhai, HU Hongyu, et al. Research on personalized lane change triggering based on traffic risk assessment[J]. Automotive Engineering, 2021, 43(9):1314-1321.
|
| [8] |
MARTINUSSEN L M, HAKAMIES-BLOMQVIST L, MOLLER M, et al. Age, gender, mileage and the DBQ: the validity of the driver behavior questionnaire in different driver groups[J]. Accident Analysis & Prevention, 2013,52:DOI: 10.1016/j.aap.2012.12.036.
|
| [9] |
卢文岱. SPSS for Windows 统计分析:第3版[M]. 北京: 电子工业出版社,2006:480.
|
| [10] |
林志坤, 吴小竹. 考虑驾驶员驾驶风格的车辆跟驰模型[J]. 地球信息科学学报, 2023, 25(9):1798-1812.
doi: 10.12082/dqxxkx.2023.230121
|
|
LIN Zhikun, WU Xiaozhu. Car-follow-ing model considering driver's driving style[J]. Journal of Geo-information Science, 2023, 25(9):1798-1812.
|
| [11] |
吴剑. 考虑人-车-路因素的行车风险评价方法研究[D]. 北京: 清华大学, 2015.
|
|
WU Jian. Research on driver-vehicle-road factors considered driving risk evaluation method[D]. Beijing: Tsinghua University, 2015.
|
| [12] |
田野, 裴华鑫, 晏松, 等. 车路协同环境下行车风险场模型的扩展与应用[J]. 清华大学学报:自然科学版, 2022, 62(3):447-457.
|
|
TIAN Ye, PEI Huaxin, YAN Song, et al. Extended driving risk field model for i-VICS and its application[J]. Journal of Tsinghua University:Science and Technology, 2022, 62(3):447-457.
|
| [13] |
LEFÈVRE S, VASQUEZ D, LAUGIER C. A survey on motion prediction and risk assessment for intelligent vehicles[J]. ROBOMECH Journal, 2014, 1(1): DOI: 10.1186/s40648-014-0001-z.
|
| [14] |
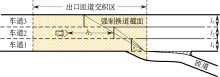
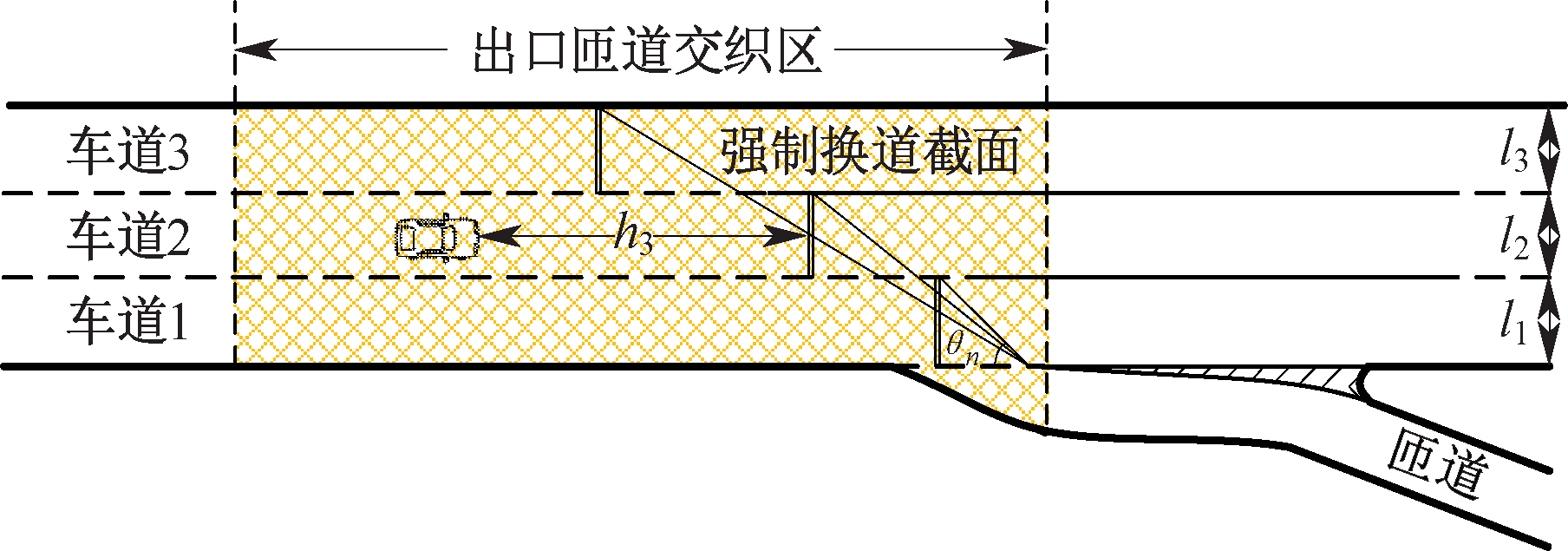
王妍. 高速公路出口匝道强制换道研究[D]. 西安: 长安大学, 2020.
|
|
WANG Yan. The lane-changing research and safe operation of the ramp exit on expressway[D]. Xi'an: Chang'an University, 2020.
|

 ), 刘冰, 陈琛, 张瑞杰, 侯智, 贺雨
), 刘冰, 陈琛, 张瑞杰, 侯智, 贺雨
 京公网安备 11010502045206号
京公网安备 11010502045206号