| [1] |
齐庆杰, 王欢, 董子文, 等. 矿井胶带运输巷火灾蔓延规律的数值模拟研究[J]. 中国安全科学学报, 2016, 26(10):36-41.
|
|
QI Qingjie, WANG Huan, DONG Ziwen, et al. Numerical simulation of belt conveyor fire spreading law in coal mine[J]. China Safety Science Journal, 2016, 26(10):36-41.
|
| [2] |
郭维强. 大采高综采覆岩两带发育高度特征研究[J]. 中国安全科学学报, 2022, 32(增2):142-147.
|
|
GUO Weiqiang. Study on characteristics of height of two zones of overburden caused by fully mechanized mining with large mining height[J]. China Safety Science Journal, 2022, 32(S2):142-147.
doi: 10.16265/j.cnki.issn1003-3033.2022.S2.0178
|
| [3] |
张晓旭, 罗伙根. 寸草塔二矿注氮防灭火数值模拟研究[J]. 中国安全科学学报, 2022, 32(增2):131-135.
|
|
ZHANG Xiaoxu, LUO Huogen. Numerical simulation research on nitrogen injection for fire prevention in Cuncaota No.2 mine[J]. China Safety Science Journal, 2022, 32(S2):131-135.
doi: 10.16265/j.cnki.issn1003-3033.2022.S2.0103
|
| [4] |
李俊志, 龙腾, 孙景亮, 等. 城市环境下固定翼无人机微分平坦时空分层轨迹规划[J/OL]. 航空学报,1-14[2025-07-10]. http://kns.cnki.net/kcms/detail/11.1929.V.20241218.1006.006.html.
|
|
LI Junzhi, LONG Teng, SUN Jingliang, et al. Differential flatness--based spatial--temporal trajectory optimization for fixed--wing UAVs in urban environments[J]. Acta Aeronautica et Astronautica Sinica,1-14[2025-07-10]. http://kns.cnki.net/kcms/detail/11.1929.V.20241218.1006.006.html.
|
| [5] |
张旭辉, 汤杜炜, 杨文娟, 等. 基于改进GWO算法的掘进机断面成形轨迹规划方法研究[J]. 工程设计学报, 2025, 32(3):296-307.
|
|
ZHANG Xuhui, TANG Duwei, YANG Wenjuan, et al. Research on trajectory planning method for roadheader section forming based on improved GWO algorithm[J]. Chinese Journal of Engineering Design, 2025, 32(3):296-307.
|
| [6] |
刘建林, 黄海松, 范青松, 等. 基于改进樽海鞘群算法的机械臂多目标轨迹规划研究[J/OL]. 中国机械工程,1-13[2025-07-10]. http://kns.cnki.net/kcms/detail/42.1294.th.20241031.1351.007.html.
|
|
LIU Jianlin, HUANG Haisong, FAN Qingsong, et al. Multi--objective trajectory planning of robotic arms based on improved salp swarm algorithm[J/OL]. China Mechanical Engineering,1-13[2025-07-10]. http://kns.cnki.net/kcms/detail/42.1294.th.20241031.1351.007.html.
|
| [7] |
王桂荣, 倪志强, 周坤, 等. 多策略改进粒子群算法的机械臂时间最优轨迹规划[J]. 中国机械工程, 2025, 36(5):1 044-1 053.
|
|
WANG Guirong, NI Zhiqiang, ZHOU Kun, et al, Time--optimal trajectory planning of robotic arms based on MIPSO algorithm[J]. China Mechanieal Engineering, 2025, 36(5):1044-1053.
|
| [8] |
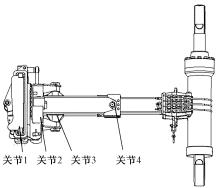
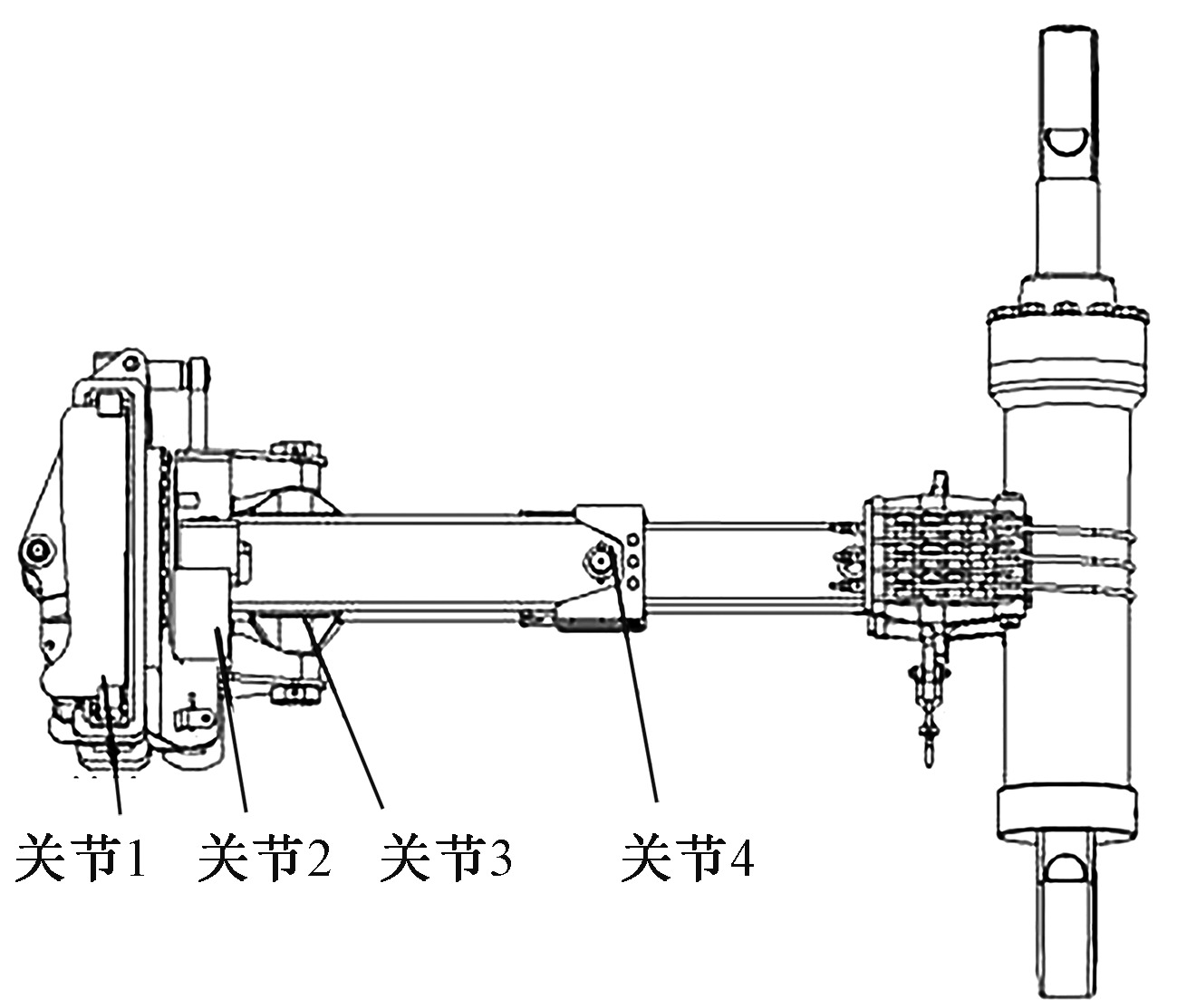
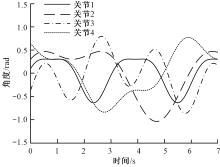
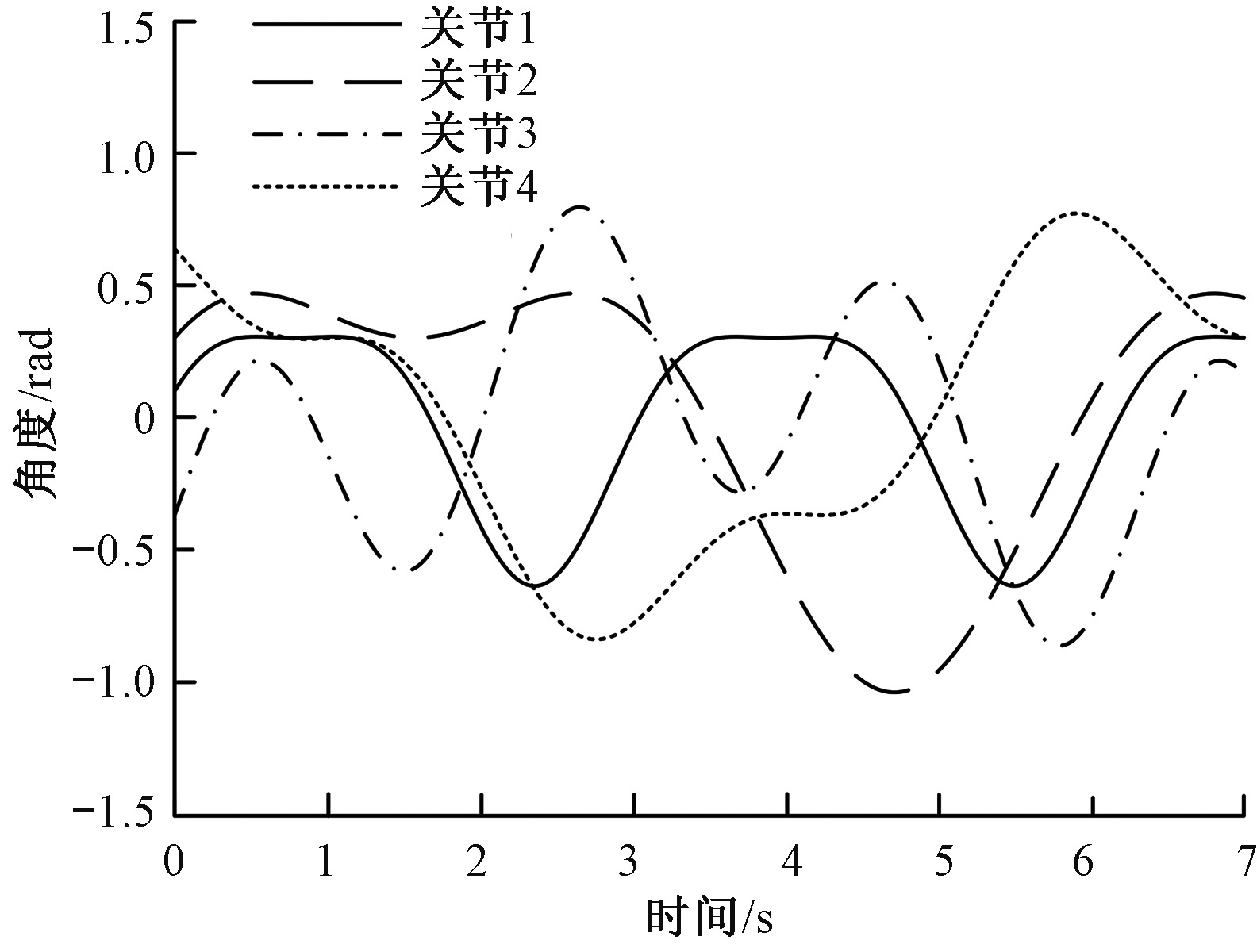
张君, 李万业, 郭家华, 等. 钻锚机器人机械臂轨迹规划方法研究[J]. 矿业科学学报, 2024, 9(5):807-816.
|
|
ZHANG Jun, LI Wanye, GUO Jiahua, et al. Research on trajectory planning method of anchor drilling robot manipulator[J]. Journal of Mining Science and Technology, 2024, 9(5):807-816.
|
| [9] |
|
|
|