| [1] |
姚志洪, 金玉婷, 王思琛, 等. 混入智能网联汽车的交通流稳定性与安全性分析[J]. 中国安全科学学报, 2021, 31(10):136-143.
doi: 10.16265/j.cnki.issn1003-3033.2021.10.019
|
|
YAO Zhihong, JIN Yuting, WANG Sichen, et al. Stability and safety analysis on traffic flow mixed with ICV[J]. China Safety Science Journal, 2021, 31(10):136-143.
doi: 10.16265/j.cnki.issn1003-3033.2021.10.019
|
| [2] |
高振海, 鲍明喜, 高菲, 等. 智能驾驶系统对周边交通车辆预期轨迹的单模态网络预测方法[J]. 汽车技术, 2022(11):1-9.
|
|
GAO Zhenhai, BAO Mingxi, GAO Fei, et al. A uni-modal network prediction method for surrounding vehicle expected trajectory in intelligent driving system[J]. Automobile Technology, 2022(11):1-9.
|
| [3] |
RUDENKO A, PALMIERI L, HERMAN M, et al. Human motion trajectory prediction: a survey[J]. The International Journal of Robotics Research, 2020, 39(8):895-935.
|
| [4] |
谢枫, 李永乐, 苏致远, 等. 一种城市交叉路口转弯车辆轨迹预测方法[J]. 军事交通学院学报, 2019, 21(11):78-83.
|
|
XIE Feng, LI Yongle, SU Zhiyuan, et al. A method for predicting turning vehicle trajectory in urban intersection[J]. Journal of Military Transportation University, 2019, 21(11):78-83.
|
| [5] |
乔少杰, 韩楠, 朱新文, 等. 基于卡尔曼滤波的动态轨迹预测算法[J]. 电子学报, 2018, 46(2):418-423.
doi: 10.3969/j.issn.0372-2112.2018.02.022
|
|
QIAO Shaojie, HAN Nan, ZHU Xinwen, et al. A dynamic trajectory prediction algorithm based on kalman filter[J]. Acta Electronica Sinica, 2018, 46(2):418-423.
doi: 10.3969/j.issn.0372-2112.2018.02.022
|
| [6] |
QUN L, KRITIKA J, U-XUAN T. Gaussian process auto regression for vehicle center coordinates trajectory prediction[C]. TENCON 2009-2019 IEEE Region 10 Conference (TENCON), 2019:25-30.
|
| [7] |
CUI Henggang, VLADAN R, FANG-CHIEH C, et al. Multimodal trajectory predictions for autonomous driving using deep convolutional networks[C]. International Conference on Robotics and Automation (ICRA), 2019:2090-2096.
|
| [8] |
MARCEL S, STEFAN H, KLAUS D. Long-term occupancy grid prediction using recurrent neural networks[C]. International Conference on Robotics and Automation (ICRA), 2019:9299-9305.
|
| [9] |
XIE Guo, SHANGGUAN Anqi, FEI Rong, et al. Motion trajectory prediction based on a CNN-LSTM sequential model[J]. Science China Information Sciences, 2020, 63(11):1-21.
|
| [10] |
CUI Henggang, THI N, FANG-CHIEH C, et al. Deep kinematic models for kinematically feasible vehicle trajectory predictions[C]. IEEE International Conference on Robotics and Automation (ICRA), 2020:10 563-10 569.
|
| [11] |
吕梦男, 孙涛, 李洁. 基于扩展卡尔曼滤波的车辆状态参数估计[J]. 农业装备与车辆工程, 2018, 56(5):77-80.
|
|
LYU Mengnan, SUN Tao, LI Jie. Vehicle state parameter estimation based on extended kalman filter[J]. Agricultural Equipment & Vehicle Engineering, 2018, 56(5):77-80.
|
| [12] |
熊晓夏, 刘擎超, 沈钰杰, 等. 基于LSTM-BF的高速公路交通事故风险模型[J]. 中国安全科学学报, 2022, 32(5):170-176.
doi: 10.16265/j.cnki.issn1003-3033.2022.05.1602
|
|
XIONG Xiaoxia, LIU Qingchao, SHEN Yujie, et al. Study on risk model of highway traffic accidents based on LSTM-BF[J]. China Safety Science Journal, 2022, 32(5):170-176.
doi: 10.16265/j.cnki.issn1003-3033.2022.05.1602
|
| [13] |
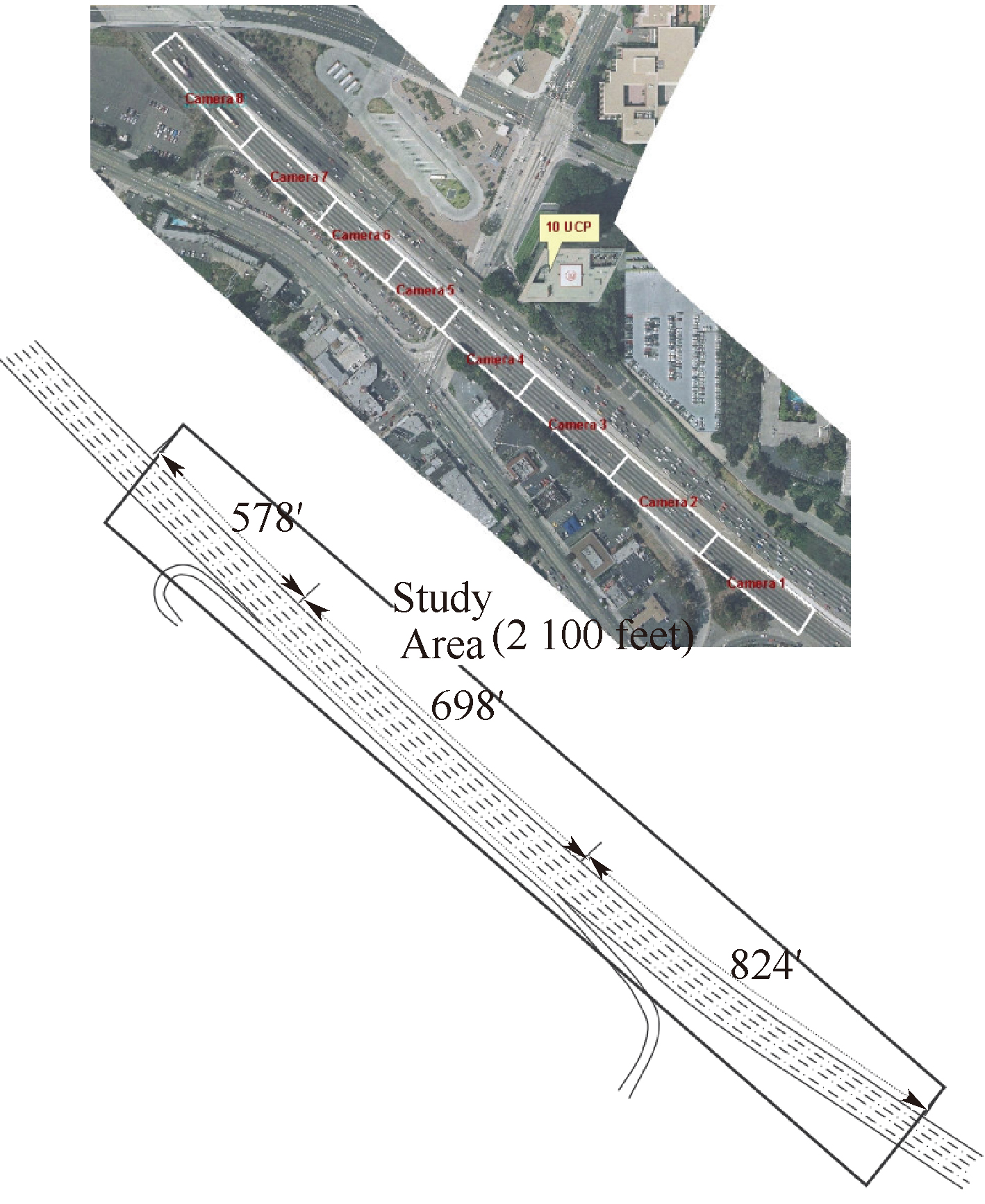
COLYAR J. Us highway i-80 dataset[EB/0L].[2023-09-15]. https://www.fhwa.dot.gov/publications/research/operations/06137/.
|
| [14] |
COLYAR J. Us highway 101 dataset[EB/0L].[2023-09-15]. https://www.fhwa.dot.gov/publications/research/operations/07030/.
|