| [1] |
赵洪元. 两条交叉航线上飞机发生危险冲突次数模型的研究[J]. 系统工程与电子技术, 1998(5):7-9,18.
|
|
ZHAO Hongyuan. Study on the model for computing the number of dangerous conflicts among aircrafts on two intersecting tracks[J]. Journal of Systems Engineering and Electronics, 1998(5): 7-9, 18.
|
| [2] |
韩松臣, 曲玉玲, 孙樊荣, 等. 航路交叉点处碰撞风险模型[J]. 西南交通大学学报, 2013, 48(2):383-389.
|
|
HAN Songchen, QU Yuling, SUN Fanrong, et al. Collision risk model around intersection of airways[J]. Journal of Southwest Jiaotong University, 2013, 48(2): 383-389.
|
| [3] |
孟祥伟, 张平, 王瑛. 交叉航路航空器碰撞风险评估[J]. 北京航空航天大学学报, 2010, 36(9): 1021-1025.
|
|
MENG Xiangwei, ZHANG Ping, WANG Ying. Aircraft collision risk assessment at intersecting air routes[J]. Journal of Beijing University of Aeronautics and Astronautics, 2010, 36(9): 1021-1025.
|
| [4] |
卢飞, 陈昊南. 模糊PID控制下的CSPRs配对进近纵向碰撞风险[J]. 中国安全科学学报, 2023, 33(11): 97-104.
doi: 10.16265/j.cnki.issn1003-3033.2023.11.0895
|
|
LU Fei, CHEN Haonan. Longitudinal collision risk of CSPRs paired approach under fuzzy PID control[J]. China Safety Science Journal, 2023, 33(11): 97-104.
doi: 10.16265/j.cnki.issn1003-3033.2023.11.0895
|
| [5] |
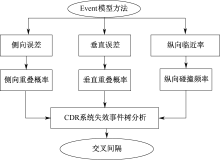
黄晋, 焦瑶瑶, 刘厚荣, 等. 基于改进Event模型的交叉航路碰撞风险分析[J]. 航空计算技术, 2023, 53(1):11-15.
|
|
HUANG Jin, JIAO Yaoyao, LIU Hourong, et al. Cross route collision risk analysis based on improved Event model[J]. Aeronautical Computing Technology, 2023, 53(1): 11-15.
|
| [6] |
张晓燕. 交叉航线碰撞风险计算方法比较[J]. 中国民航飞行学院学报, 2009, 20(3):10-12,16.
|
|
ZHANG Xiaoyan. Comparison of cross route collision risk calculation methods[J]. Journal of Civil Aviation Flight University of China, 2009, 20(3): 10-12, 16.
|
| [7] |
NOVAK A, HAVEL K, ADAMKO P. Number of conflicts at the route intersection-minimum distance model[J]. Aviation, 2019, 23(1): 1-6.
|
| [8] |
KALLINEN V, MCFADYEN A. Collision risk modeling and analysis for lateral separation to support unmanned traffic management[J]. Risk Analysis, 2022, 42(4): 854-881.
|
| [9] |
KALLINEN V A. Collision risk modelling for unmanned aircraft separation and traffic management[D]. Queensland: Queensland University of Technology, 2022.
|
| [10] |
SESAR 2021, Algorithms for analysing the collision risk[S].
|
| [11] |
李琦, 甘旭升, 孙静娟, 等. 军航无人机与民航航班侧向碰撞风险评估[J]. 北京航空航天大学学报, 2021, 47(4):724-730.
|
|
LI Qi, GAN Xusheng, SUN Jingjuan, et al. Risk assessment of lateral collision between military UAV and civil aviation flight[J]. Journal of Beijing University of Aeronautics and Astronautics, 2021, 47(4): 724-730.
|
| [12] |
卢飞, 陈昊南. 基于PID的陆区航路纵向碰撞风险控制[J]. 中国安全科学学报, 2023, 33(9):86-93.
doi: 10.16265/j.cnki.issn1003-3033.2023.09.1126
|
|
LU Fei, CHEN Haonan. Longitudinal collision risk control in land route based on PID[J]. China Safety Science Journal, 2023, 33(9): 86-93.
doi: 10.16265/j.cnki.issn1003-3033.2023.09.1126
|
| [13] |
王莉莉, 阳杰. 基于位置误差概率模型的物流无人机安全间隔评估方法研究[J]. 中国安全生产科学技术, 2022, 18(3):184-192.
|
|
WANG Lili, YANG Jie. Research on assessment method of safety separation for logistics UAVs based on position error probability model[J]. Journal of Safety Science and Technology, 2022, 18(3): 184-192.
|
| [14] |
张健, 王守源, 赵嶷飞, 等. 城市无人机航线飞行间隔与调控频率综合研究[J]. 交通信息与安全, 2024, 42(1):11-18.
|
|
ZHANG Jian, WANG Shouyuan, ZHAO Yifei, et al. Comprehensive study on route flight separation and control frequency of urban UAV[J]. Journal of Transport Information and Safety, 2024, 42(1): 11-18.
|