| [1] |
GOODCHILD A, TOY J. Delivery by drone: an evaluation of unmanned aerial vehicle technology in reducing CO2, emissions in the delivery service industry[J]. Transportation Research Part D: Transport and Environment, 2017, 61: 58-67.
doi: 10.1016/j.trd.2017.02.017
|
| [2] |
GERARDO O, THOMAS L, LUIS G, et al. UAS airborne collision severity evaluation, final report volume I[R]. Department of Transportation Federal Aviation Administration, USA, 2017.
|
| [3] |
TAN Dayang, CHI Wanchao, MOHAMED S M F B, et al. Study on impact of separation distance to traffic management for small uas operations in urban environment[M]. Transdisciplinary Engineering:A Paradigm Shift. Amsterdam: IOS Press, 2017: 39-46.
|
| [4] |
张洪海, 李博文, 刘皞, 等. 自由空域下多旋翼无人机安全间隔标定方法[J]. 系统工程与电子技术, 2023, 45(10): 3149-3156.
doi: 10.12305/j.issn.1001-506X.2023.10.19
|
|
ZHANG Honghai, LI Bowen, LIU Hao, et al. Demarcation method of safety separation for multi-rotor UAV in free airspace[J]. Systems Engineering and Electronics, 2023, 45(10): 3149-3156.
doi: 10.12305/j.issn.1001-506X.2023.10.19
|
| [5] |
励瑾, 钟罡, 张晓玮, 等. 城市低空无人机空中碰撞风险计算方法研究[J]. 现代交通与冶金材料, 2022, 2(5): 20-30.
|
| [6] |
WEIBEL R E, HANSMAN R J. Safety considerations for operation of unmanned aerial vehicles in the national airspace system: ICAT-2005-1[R]. Massachusetts Institute of Technology, 2005.
|
| [7] |
DALAMAGKIDIS K, VALAVANIS K P, PIEGL L A. On integrating unmanned aircraft systems into the national airspace system[M]. Netherlands: Springer, 2009: 21-49.
|
| [8] |
CHE MAN M H, HU Haoliang, LOW K H. Crash area estimation for ground risk of small unmanned aerial vehicles due to propulsion system failures[C]. AIAA Scitech 2022 Forum, 2022: 1506-1522.
|
| [9] |
MILANO M, PRIMATESTA S, GUGLIERI G. Air risk maps for unmanned aircraft in urban environments[C]. 2022 International Conference on Unmanned Aircraft Systems (ICUAS), 2022: 1073-1082.
|
| [10] |
JIAO Qingyu, LIU Yansi, ZHENG Zhigang, et al. Ground risk assessment for unmanned aircraft systems based on dynamic model[J]. Drones, 2022, 6(11): 324-352.
doi: 10.3390/drones6110324
|
| [11] |
韩鹏, 赵嶷飞. 基于飞行环境建模的UAV地面撞击风险研究[J]. 中国安全科学学报, 2020, 30(1): 142-147.
doi: 10.16265/j.cnki.issn1003-3033.2020.01.022
|
|
HAN Peng, ZHAO Yifei. Study on ground impact risk of UAV based on flight environment[J]. China Safety Science Journal, 2020, 30(1): 142-147.
doi: 10.16265/j.cnki.issn1003-3033.2020.01.022
|
| [12] |
JAR-DEL-WG6-D.04,Guidelines on specific operations risk assessment (SORA)[S]. 2019.
|
| [13] |
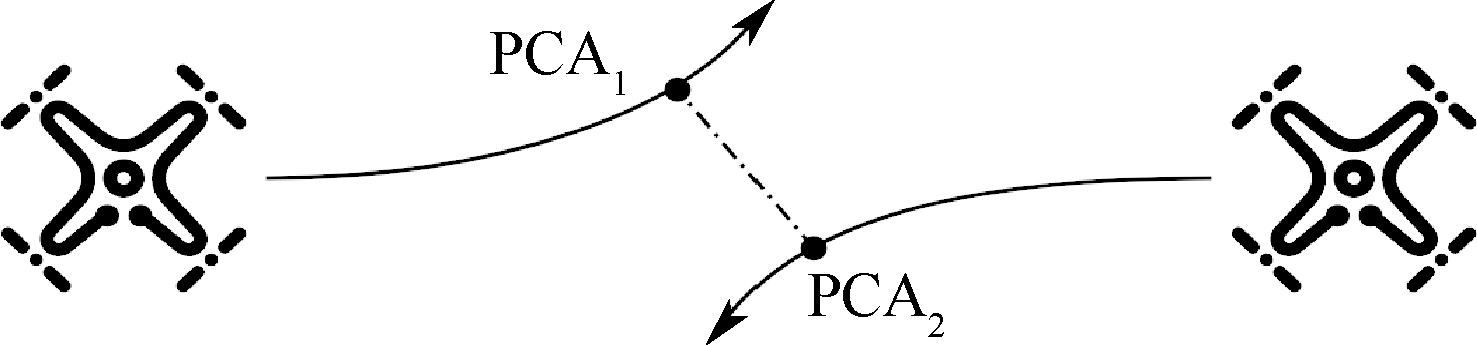
岳仁田, 马赵飞. 基于几何关系的无人机低空飞行冲突探测与解脱策略[J]. 中国安全科学学报, 2023, 33(5): 112-120.
doi: 10.16265/j.cnki.issn1003-3033.2023.05.2049
|
|
YUE Rentian, MA Zhaofei. Detection and resolution strategy of UAV low-altitude conflict based on geometric relations[J]. China Safety Science Journal, 2023, 33(5): 112-120.
doi: 10.16265/j.cnki.issn1003-3033.2023.05.2049
|
| [14] |
SHINSUKE E. Aircraft collision models[R]. Massachusetts Institute of Technology, 1982.
|
| [15] |
USA Department of Transportation Federal Aviation Administration,AC No: 431.35-1.Expected casualty calculations for commercial space launch and reentry missions[Z]. 2013.
|
| [16] |
SHIVELY R J, VU K P L, BUKER T J. Unmanned aircraft system response to air traffic control clearances[J]. Human, 2013, 57(1): 31-35.
|
| [17] |
STELZER E K, MORGAN C E, MCGARRY K A, et al. Human-in-the-loop simulations of surface trajectory-based operations[C]. Ninth USA/Europe Air Traffic Management Research and Development Seminar, 2012: 1-12.
|
| [18] |
李亚飞, 刘明欢, 王莉莉. 建筑物影响下的无人机城区运行风险评估[J]. 中国安全科学学报, 2022, 32(7): 136-142.
doi: 10.16265/j.cnki.issn1003-3033.2022.07.1226
|
|
LI Yafei, LIU Minghuan, WANG Lili. Risk assessment of urban UAV operation under influence of buildings[J]. China Safety Science Journal, 2022, 32(7): 136-142.
doi: 10.16265/j.cnki.issn1003-3033.2022.07.1226
|

 ), 闫博芸1, 孙廪实2, 韩鹏1, 郑志刚3, 焦庆宇3
), 闫博芸1, 孙廪实2, 韩鹏1, 郑志刚3, 焦庆宇3
 京公网安备 11010502045206号
京公网安备 11010502045206号