| [1] |
刘智勇, 赵晓丹, 祁宏昌, 等. 新时代无人机电力巡检技术展望[J]. 南方能源建设, 2019, 6(4): 1-5.
|
|
LIU Zhiyong, ZHAO Xiaodan, QI Hongchang, et al. Prospect of UAV power inspection technology in new era[J]. Southern Energy Construction, 2019, 6(4): 1-5.
|
| [2] |
高珩, 鲍鹏. 旅行商问题求解算法综述[J]. 软件导刊, 2009, 8(11): 67-68.
|
| [3] |
DENG Yanlan, XIONG Juxia, WANG Qiuhong. A hybrid cellular genetic algorithm for the traveling salesman problem[J]. Mathematical Problems in Engineering, 2021, 2021(2):DOI:10.1155/2021/6697598.
|
| [4] |
EZUGWU E A, ADEWUMI O A, FRINCU E M. Simulated annealing based symbiotic organisms search optimization algorithm for traveling salesman problem[J]. Expert Systems With Applications, 2017, 77: 189-210.
|
| [5] |
余丽, 陆锋, 杨林. 交通网络旅行商路径优化的遗传禁忌搜索算法[J]. 测绘学报, 2014, 43(11): 1197-1203.
doi: 10.13485/j.cnki.11-2089.2014.0184
|
|
YU Li, LU Feng, YANG Lin. A hybrid algorithm for traveling salesman problem in road network[J]. Acta Geodaetica et Cartographica Sinica, 2014, 43(11): 1197-1203.
doi: 10.13485/j.cnki.11-2089.2014.0184
|
| [6] |
陈科胜, 鲜思东, 郭鹏. 求解旅行商问题的自适应升温模拟退火算法[J]. 控制理论与应用, 2021, 38(2): 245-254.
|
|
CHEN Kesheng, XIAN Sidong, GUO Peng. Adaptive temperature rising simulated annealing algorithm fortraveling salesman problem[J]. Control Theory and Applications, 2021, 38(2): 245-254.
|
| [7] |
刘海龙, 雷斌, 王菀莹, 等. 求解TSP问题的改进融合遗传灰狼优化算法[J]. 计算机仿真, 2023, 40(9): 333-338.
|
|
LIU Hailong, LEI Bin, WANG Wanying, et al. Improved fused genetic grey wolf optimization algorithm for solving TSP[J]. Computer Simulation, 2023, 40(9): 333-338.
|
| [8] |
张树卓. 计及风场的输电线路无人机巡检路径规划研究[D]. 济南: 山东大学, 2021.
|
|
ZHANG Shuzhuo. Research on UAV path planning of transmission line inspection considering wind field[D]. Jinan: Shandong University, 2021.
|
| [9] |
韩鹏, 张冰玉. 基于改进蚁群算法的无人机安全航路规划研究[J]. 中国安全科学学报, 2021, 31(1): 24-29.
doi: 10.16265/j.cnki.issn 1003-3033.2021.01.004
|
|
HAN Peng, ZHANG Bingyu. Safety route planing of UAV based on improved ant colony algorithm[J]. China Safety Science Journal. 2021. 31(1):24-29.
doi: 10.16265/j.cnki.issn 1003-3033.2021.01.004
|
| [10] |
王猛, 王道波, 王博航, 等. 基于改进NSGA-II的多无人机三维空间协同航迹规划研究[J]. 机械与电子, 2021, 39(11): 73-80.
|
|
WANG Meng, WANG Daobo, WANG Bohang, et al. Three-dimensional multi -UAV cooperative path planning based on an improved NSGA-II algorithm[J]. Machinery & Electronics, 2021, 39(11): 73-80.
|
| [11] |
韩鹏, 赵嶷飞. 基于飞行环境建模的UAV地面撞击风险研究[J]. 中国安全科学学报, 2020, 30(1): 142-147.
doi: 10.16265/j.cnki.issn1003-3033.2020.01.022
|
|
HAN Peng, ZHAO Yifei. Study on ground impact risk of UAV based on flight environment[J]. China Safety Science Journal, 2020, 30(1): 142-147.
doi: 10.16265/j.cnki.issn1003-3033.2020.01.022
|
| [12] |
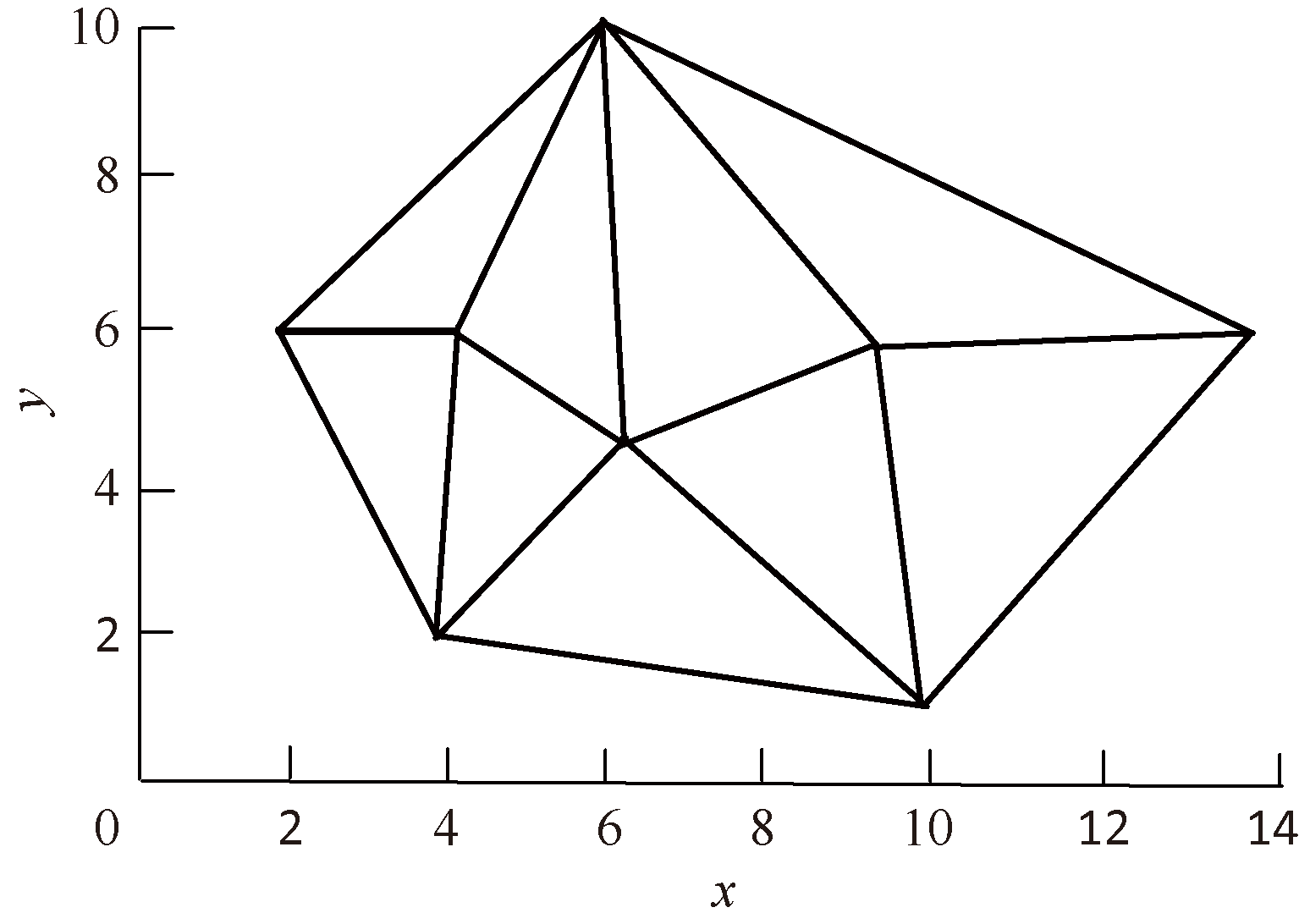
曾薇, 孟祥旭, 杨承磊, 等. 平面多边形域的快速约束Delaunay三角化[J]. 计算机辅助设计与图形学学报, 2005, 17(9): 1933-1940.
|
|
ZENG Wei, MENG Xiangxu, YANG Chenglei, et al. Fast constrained delaunay triangulation for planar polygonal domains[J]. Journal of Computer-Aided Design & Computer Graphics, 2005, 17(9): 1933-1940.
|
| [13] |
HU Xiaobing, WANG Ming, LEESON M S, et al. Deterministic agent-based path optimization by mimicking the spreading of ripples[J]. Evolutionary Computation, 2016, 24(2): 319-46.
doi: 10.1162/EVCO_a_00156
pmid: 26066805
|
| [14] |
胡小兵, 袁莉燕, 李航, 等. 基于涟漪扩散算法的应急疏散路径优化方法研究[J]. 交通运输系统工程与信息, 2024, 24(1): 253-261.
|
|
HU Xiaobing, YUAN Liyan, LI Hang, et al. Optimization of emergency evacuation route based on ripple-spreading algorithm[J]. Journal of Transportation Systems Engineering and Information, 2024, 24(1): 253-261.
|
| [15] |
王永峰, 徐莹, 王涛. 基于数字高程模型制作山区坡度分级栅格数据[J]. 测绘与空间地理信息, 2014, 37(12): 36-38.
|
|
WANG Yongfeng, XU Ying, WANG Tao. Mapping slope graded map of mountainous area based on digital elevation model[J]. Geomatics & Spatial Information Technology, 2014, 37(12): 36-38.
|