| [1] |
张辉. 《重大综合灾害耦合实验和模拟技术与装备》(2017YFC0803300)结题报告[R]. 清华大学, 2021.
|
| [2] |
廖永丰. 北斗综合减灾与应急典型示范项目总体布局和进展经验[J]. 卫星应用, 2018 (4): 22-25.
|
| [3] |
范维澄, 苗鸿雁, 袁亮, 等. 我国安全科学与工程学科“十四五”发展战略研究[J]. 中国科学基金, 2021, 35(6): 864-870.
|
|
FAN Weicheng, MIAO Hongyan, YUAN Liang, et al. Development strategy of safety discipline in China during the 14th Five-Year plan period[J]. Bulletin of National Natural Science Foundation of China, 2021, 35(6): 864-870.
|
| [4] |
BA Rui, WANG Chenyang, KOU Luyao, et al. Rethinking the urban resilience: extension and connotation[J]. Journal of Safety Science and Resilience, 2022, 3(4): 398-403.
doi: 10.1016/j.jnlssr.2022.08.004
|
| [5] |
徐志强, 杨建思, 姜旭东, 等. 无人机获取区域全景图试验[J]. 地震地磁观测与研究, 2013, 34(3/4): 208-212.
|
|
XU Zhiqiang, YANG Jiansi, JIANG Xudong, et al. Testing of regional panorama obtained from UAV[J]. Seismological and Geomagnetic Observation and Research, 2013, 34(3/4): 208-212.
|
| [6] |
黄恩钊, 何萍, 王挺, 等. 基于指挥系统的无人机在灾情快速获取中的应用[J]. 华南地震, 2018, 38(增1): 53-56.
|
|
HUANG Enzhao, HE Ping, WANG Ting, et al. Application of UAV based on earthquake command system in rapid disaster acquisition[J]. South China Journal of Seismology, 2018, 38(S1): 53-56.
|
| [7] |
郭建兴, 袁小祥, 韶丹. 基于“数字地球”的无人机遥感地震应急系统研制[J]. 信息通信, 2018 (8): 65-68.
|
|
GUO Jianxing, YUAN Xiaoxiang, SHAO Dan. Development of unmanned aerial vehicle remote sensing earthquake emergencysystem based on digital earth platform[J]. Changjiang Information & Communications, 2018(8): 65-68.
|
| [8] |
张顺, 赵玉金, 白永飞, 等. 基于低空无人机的草原灌丛遥感辨识方法[J]. 热带地理, 2019, 39(4): 512-520.
|
|
ZHANG Shun, ZHAO Yujin, BAI Yongfei, et al. Remote sensing identification of grassland shrubs using low-altitude unmanned aerial vehicles[J]. Tropical Geography, 2019, 39 (4): 512-520.
doi: 10.13284/j.cnki.rddl.003147
|
| [9] |
李晓阳, 郭慧, 李晓慧, 等. 地震灾情获取中无人机直播关键技术研究[J]. 震灾防御技术, 2023, 18(4): 773-779.
|
|
LI Xiaoyang, GUO Hui, LI Xiaohui, et al. The key technology research of drone live broadcast in earthquake disaster acquisition[J]. Technology for Earthquake Disaster Prevention, 2023, 18(4): 773-779.
|
| [10] |
张雪华, 王晓青, 杜晓霞, 等. 基于无人机遥感影像及其点云特征的建筑物震害提取[J]. 地震研究, 2019, 42(2): 230-235.
|
|
ZHANG Xuehua, WANG Xiaoqing, DU Xiaoxia, et al. Extraction of buildings' seismic damage based on remote sensingImages of UAV and Its point clouds characteristic[J]. Journal of Seismological Research, 2019, 42(2): 230-235.
|
| [11] |
任丽艳, 李英成, 肖金城, 等. 测绘无人机灾害现场多源数据集成与智能服务[J]. 测绘科学, 2020, 45(12): 139-144.
|
|
REN Liyan, LI Yingcheng, XIAO Jincheng, et al. Multi-source data integration and intelligent service of surveying and mapping UAV for disaster scene[J]. Science of Surveying and Mapping, 2020, 45(12): 139-144.
|
| [12] |
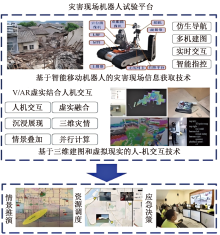
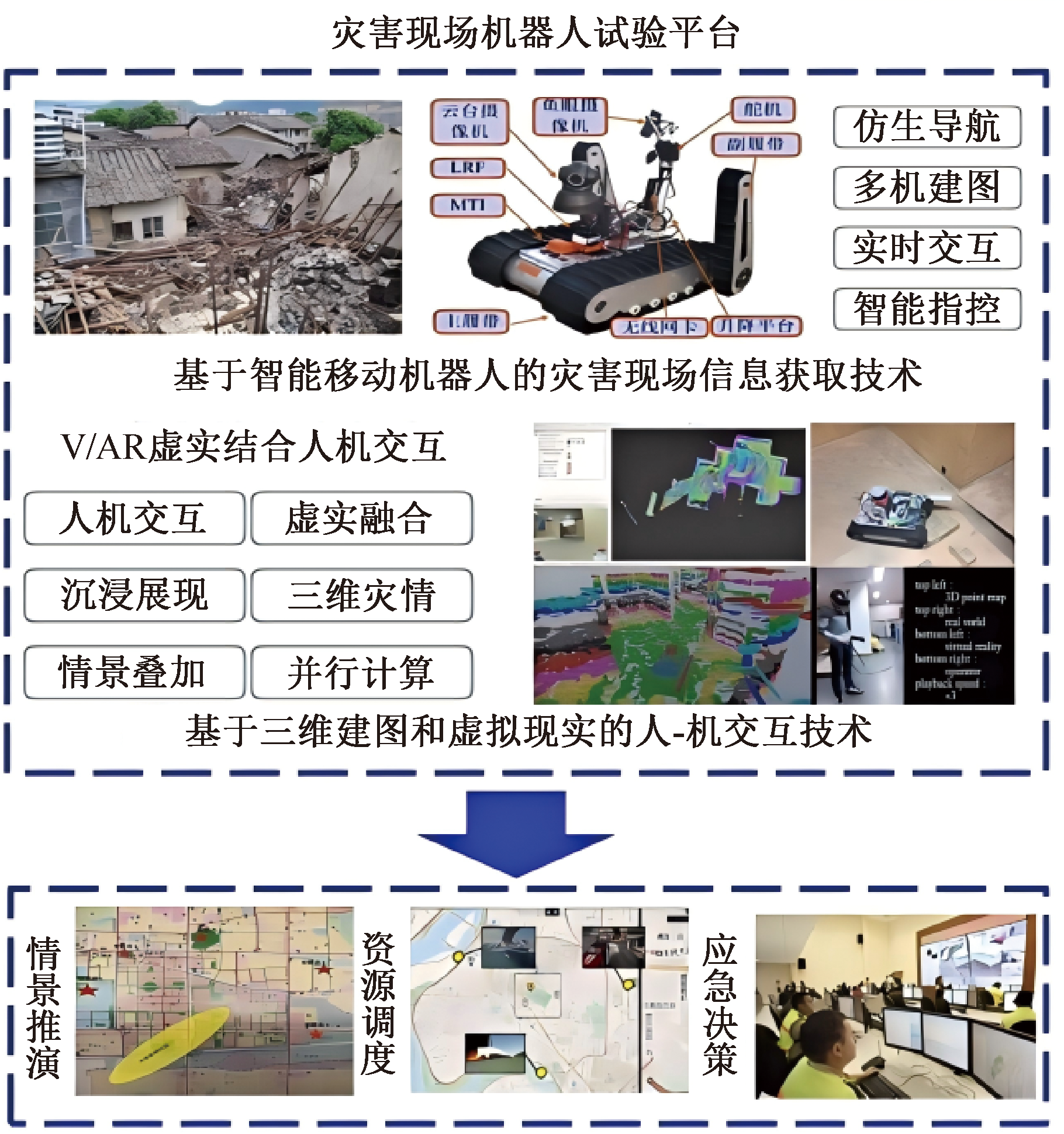
张辉, 王盼, 肖军浩, 等. 一种基于三维建图和虚拟现实的人机交互系统[J]. 控制与决策, 2018, 33(11): 1975-1982.
|
|
ZHANG Hui, WANG Pan, XIAO Junhao, et al. A human-robot interaction system based on 3D mapping and virtualreality[J]. Control and Decision, 2018, 33(11): 1975-1982.
|
| [13] |
汤仕豪. 基于小型无人机的建筑内部灾情信息获取与建图[D]. 大连: 大连理工大学, 2020.
|
|
TANG Shihao. Disaster information acquisition and map building for MAVs in the internal scene of a building[D]. Dalian: Dalian University of Technology, 2020.
|
| [14] |
杨建思, 李晓丽, 郑钰, 等. 采用无人机获取大震巨灾信息的技术瓶颈及发展展望[C]. 中国地球物理学会地球物理技术委员会第十届学术会议, 2023: 87-90.
|
| [15] |
李金香, 谭明, 孙甲宁, 等. 新疆拜城MS5.4地震无人机遥感快速灾情获取与分析[J]. 震灾防御技术, 2022, 17(4): 784-794.
|
|
LI Jinxiang, TAN Ming, SUN Jianing, et al. UAV remote sensing information acquisition and analysis of Ms5.4 earthquake in Baicheng county, Xinjiang[J]. Technology for Earthquake Disaster Prevention, 2022, 17(4): 784-794.
|
| [16] |
邓青, 施成浩, 王辰阳, 等. 基于E-LVC技术的重大综合灾害耦合情景推演方法[J]. 清华大学学报:自然科学版, 2021, 61(6): 487-493.
|
|
DENG Qing, SHI Chenghao, WANG Chenyang, et al. Coupled disaster scenario evaluation and response method based on the E-LVC technology[J]. Journal of Tsinghua University:Science and Technology, 2021, 61(6): 487-493.
|
| [17] |
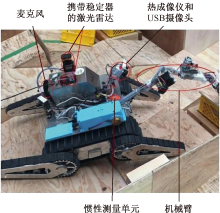
张辉, 蔡向东, 海丹, 等. NuBot救援机器人整体设计[J]. 机器人技术与应用, 2010(4):17-19.
|
| [18] |
SAARINEN J, STOYANOV T, ANDREASSON H, et al. Fast 3D mapping in highly dynamic environments using normal distributions transform occupancy maps[C]. 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems. IEEE, 2013: 4694-4701.
|
| [19] |
王伟, 张思远, 齐庆杰, 等. 地震诱发井工煤矿次生灾害系统研究[J]. 中国安全科学学报, 2023, 33(7):196-202.
doi: 10.16265/j.cnki.issn1003-3033.2023.07.1699
|
|
WANG Wei, ZHANG Siyuan, QI Qingjie, et al. Study on system of secondary disasters induced by earthquakes in underground coal mine[J]. China Safety Science Journal, 2023, 33(7):196-202.
doi: 10.16265/j.cnki.issn1003-3033.2023.07.1699
|
| [20] |
郑金子, 杨奇, 刘君, 等. 道路交通事故现场实景三维建模技术研究[J]. 中国安全科学学报, 2023, 33(增1):138-144.
|
|
ZHENG Jinzi, YANG Qi, LIU Jun, et al. Research on 3D real scene reconstruction for road traffic accidents[J]. China Safety Science Journal, 2023, 33(S1):138-144.
doi: 10.16265/j.cnki.issn1003-3033.2023.S1.0132
|