| [1] |
GUCMA L, BATISTA M, PERKOVIČ M. A probabilistic framework for assessing vessel impact on bridges considering technical failures: insights from the Baltimore accident case study[J]. Marine Structures, 2026, 105: DOI: 10.1016/j.marstruc.2025.103906.
|
| [2] |
WANG Jinhui, ZHOU Yu, ZHANG Shaogang, et al. Societal risk acceptance criteria of the global general cargo ships[J]. Ocean Engineering, 2022, 261: DOI: 10.1016/j.oceaneng.2022.112162.
|
| [3] |
GOERLANDT F, MONTEWKA J. A probabilistic model for accidental cargo oil outflow from product tankers in a ship-ship collision[J]. Marine Pollution Bulletin, 2014, 79(1/2): 130-144.
doi: 10.1016/j.marpolbul.2013.12.026
|
| [4] |
WANG Jinhui, ZHOU Yu, ZHUANG Lei, et al. Study on the critical factors and hot spots of crude oil tanker accidents[J]. Ocean and Coastal Management, 2022, 217: DOI: 10.1016/j.ocecoaman.2021.106010.
|
| [5] |
TUNCEL A L, BESIKCI E B, AKYUZ E, et al. Safety analysis of fire and explosion (F and E) accidents risk in bulk carrier ships under fuzzy fault tree approach[J]. Safety Science, 2023, 158: DOI: 10.1016/j.ssci.2022.105972.
|
| [6] |
UGURLU Ö, YILDLZ S, LOUGHNEY S, et al. Modified human factor analysis and classification system for passenger vessel accidents (HFACS-PV)[J]. Ocean Engineering, 2018, 161: 47-61.
doi: 10.1016/j.oceaneng.2018.04.086
|
| [7] |
AYDIN M, ARICI S S, AKYUZ E, et al. A probabilistic risk assessment for asphyxiation during gas inerting process in chemical tanker ship[J]. Process Safety and Environmental Protection, 2021, 155: 532-542.
doi: 10.1016/j.psep.2021.09.038
|
| [8] |
WANG J, PILLAY A, KWON Y S, et al. An analysis of fishing vessel accidents[J]. Accident Analysis & Prevention, 2005, 37(6): 1019-1024.
doi: 10.1016/j.aap.2005.05.005
|
| [9] |
SUI Zhongyi, WEN Yuanqiao, HUANG Yamin, et al. Maritime accidents in the Yangtze river: a time series analysis for 2011-2020[J]. Accident Analysis & Prevention, 2023, 180: DOI: 10.1016/j.aap.2022.106901.
|
| [10] |
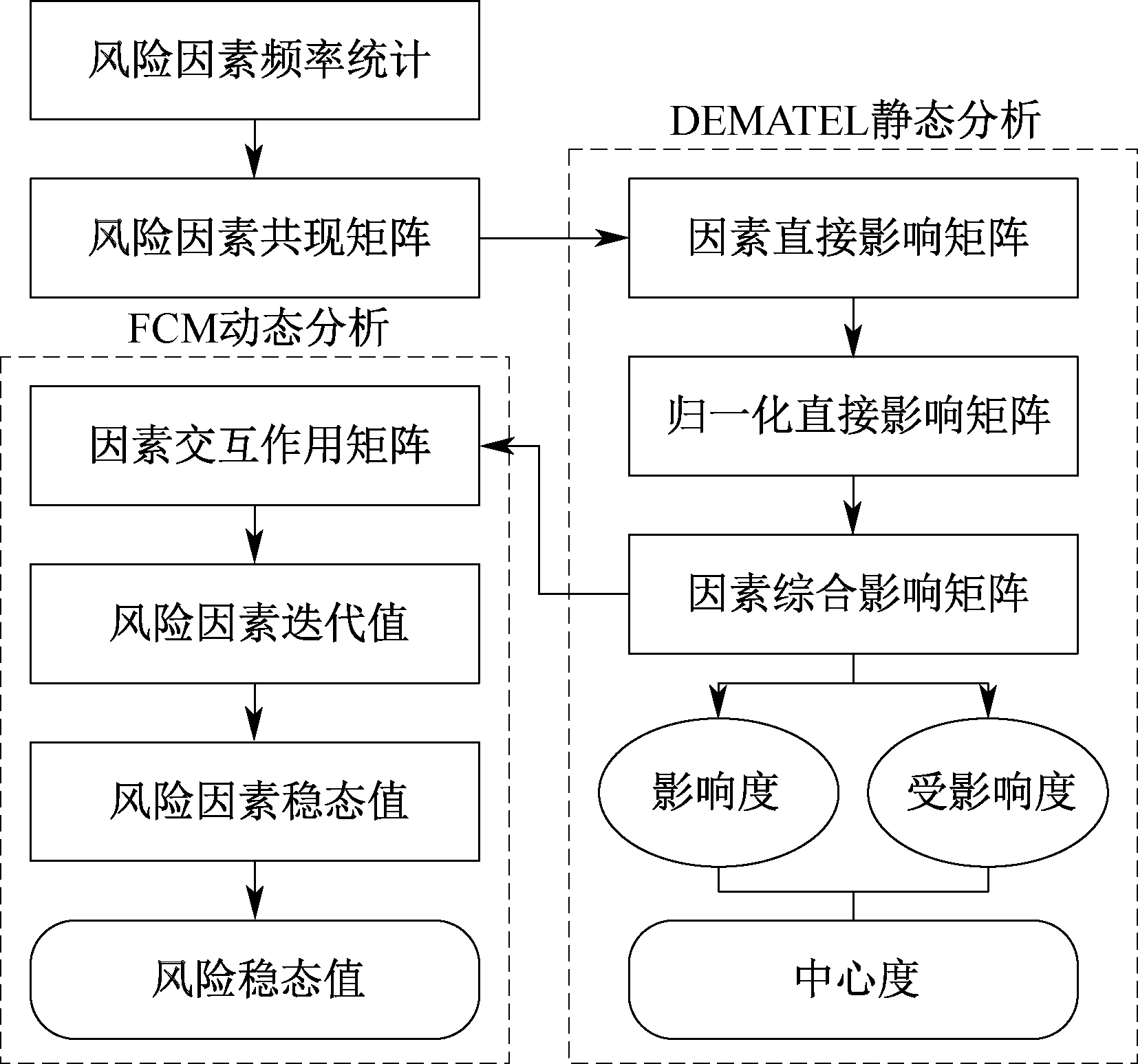
MA Laihao, MA Xiaoxue, LAN He, et al. A data-driven method for modeling human factors in maritime accidents by integrating DEMATEL and FCM based on HFACS: a case of ship collisions[J]. Ocean Engineering, 2022, 266: DOI: 10.1016/j.oceaneng.2022.112699.
|
| [11] |
MA Laihao, MA Xiaoxue, LAN He, et al. A methodology to assess the interrelationships between contributory factors to maritime transport accidents of dangerous goods in China[J]. Ocean Engineering, 2022, 266: DOI: 10.1016/j.oceaneng.2022.112769.
|
| [12] |
KUZU A C. Risk analysis of break-in-two accident of ships using fuzzy DEMATEL method[J]. Ocean Engineering, 2021, 235: DOI: 10.1016/j.oceaneng.2021.109410.
|
| [13] |
SONER O. Application of fuzzy DEMATEL method for analysing of accidents in enclosed spaces onboard ships[J]. Ocean Engineering, 2021, 220: DOI: 10.1016/j.oceaneng.2020.108507.
|
| [14] |
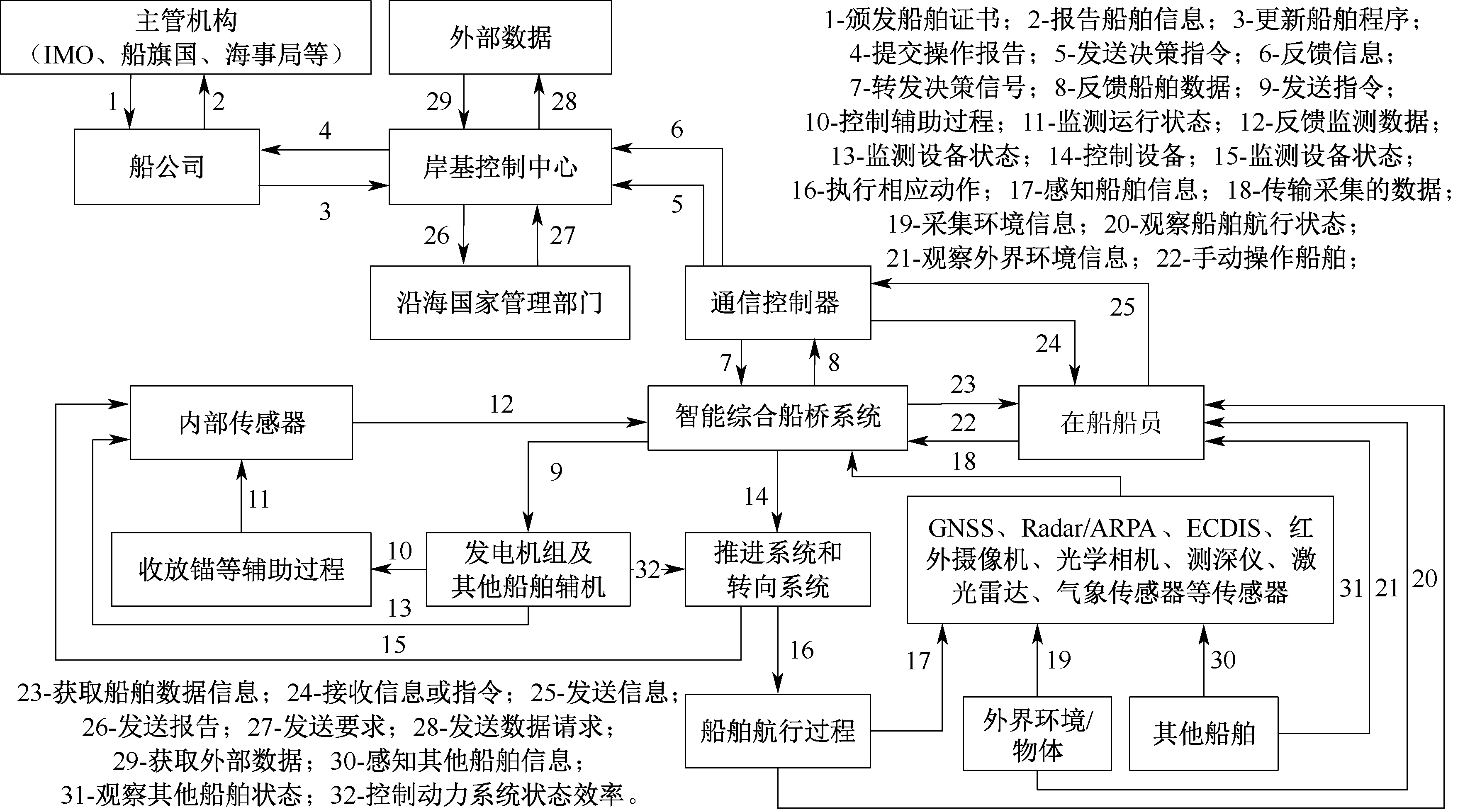
WROBEL K, GIL M, MONTEWKA J. Identifying research directions of a remotely-controlled merchant ship by revisiting her system-theoretic safety control structure[J]. Safety Science, 2020, 129: DOI: 10.1016/j.ssci.2020.104797.
|
| [15] |
FAN Cunlong, MONTEWKA J, ZHANG Di. A risk comparison framework for autonomous ships navigation[J]. Reliability Engineering & System Safety, 2022, 226: DOI: 10.1016/j.ress.2022.108709.
|
| [16] |
FAN Cunlong, WOBEL K, MONTEWKA J, et al. A framework to identify factors influencing navigational risk for maritime autonomous surface ships[J]. Ocean Engineering, 2020, 202: DOI: 10.1016/j.oceaneng.2020.107188.
|
| [17] |
秦庭荣, 周歆捷, 何荥杰, 等. 基于STPA-FCM模型的自主航行船舶功能系统分析[J]. 中国安全科学学报, 2023, 33(8): 8-14.
doi: 10.16265/j.cnki.issn1003-3033.2023.08.1571
|
|
QIN Tingrong, ZHOU Xinjie, HE Xingjie, et al. Analysis of functional systems of MASS based on STPA-FCM model[J]. China Safety Science Journal, 2023, 33(8): 8-14.
doi: 10.16265/j.cnki.issn1003-3033.2023.08.1571
|
| [18] |
南希·莱文森[美]. 基于系统思维构筑安全系统[M]. 唐涛, 牛儒, 译. 北京: 国防工业出版社, 2015.
|
|
LEVESON N. Engineering a safer world: systems thinking applied to safety[M]. TANGTao, NIURu, Translated. Beijing: National Defense Industry Press, 2015.
|
| [19] |
杨佳宇, 段文杰, 李廷文, 等. 基于模糊认知图的水上交通事故涌现分析[J]. 交通信息与安全, 2019, 37(4): 19-26.
|
|
YANG Jiayu, DUAN Wenjie, LI Tingwen, et al. An analysis of emergence of water traffic accidents based on fuzzy cognitive map[J]. Journal of Transport Information and Safety, 2019, 37(4): 19-26.
|
| [20] |
王梦雨, 郭国平, 吴兵. 基于FCM的内河一类船长实操考试效能评估[J]. 交通信息与安全, 2017, 35(4): 92-99, 126.
|
|
WANG Mengyu, GUO Guoping, WU Bing. A performance evaluation of practice examination for inland first-grade captains based on fuzzy cognitive maps[J]. Journal of Transport Information and Safety, 2017, 35(4): 92-99, 126.
|