中国安全科学学报 ›› 2023, Vol. 33 ›› Issue (8): 68-76.doi: 10.16265/j.cnki.issn1003-3033.2023.08.0038
魏明1,2( ), 孙雅茹1, 孙博1, 王盛杰2
), 孙雅茹1, 孙博1, 王盛杰2
WEI Ming1,2(), SUN Yaru1, SUN Bo1, WANG Shengjie2
摘要:
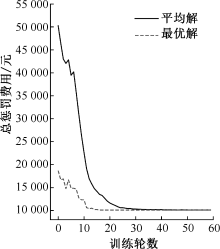
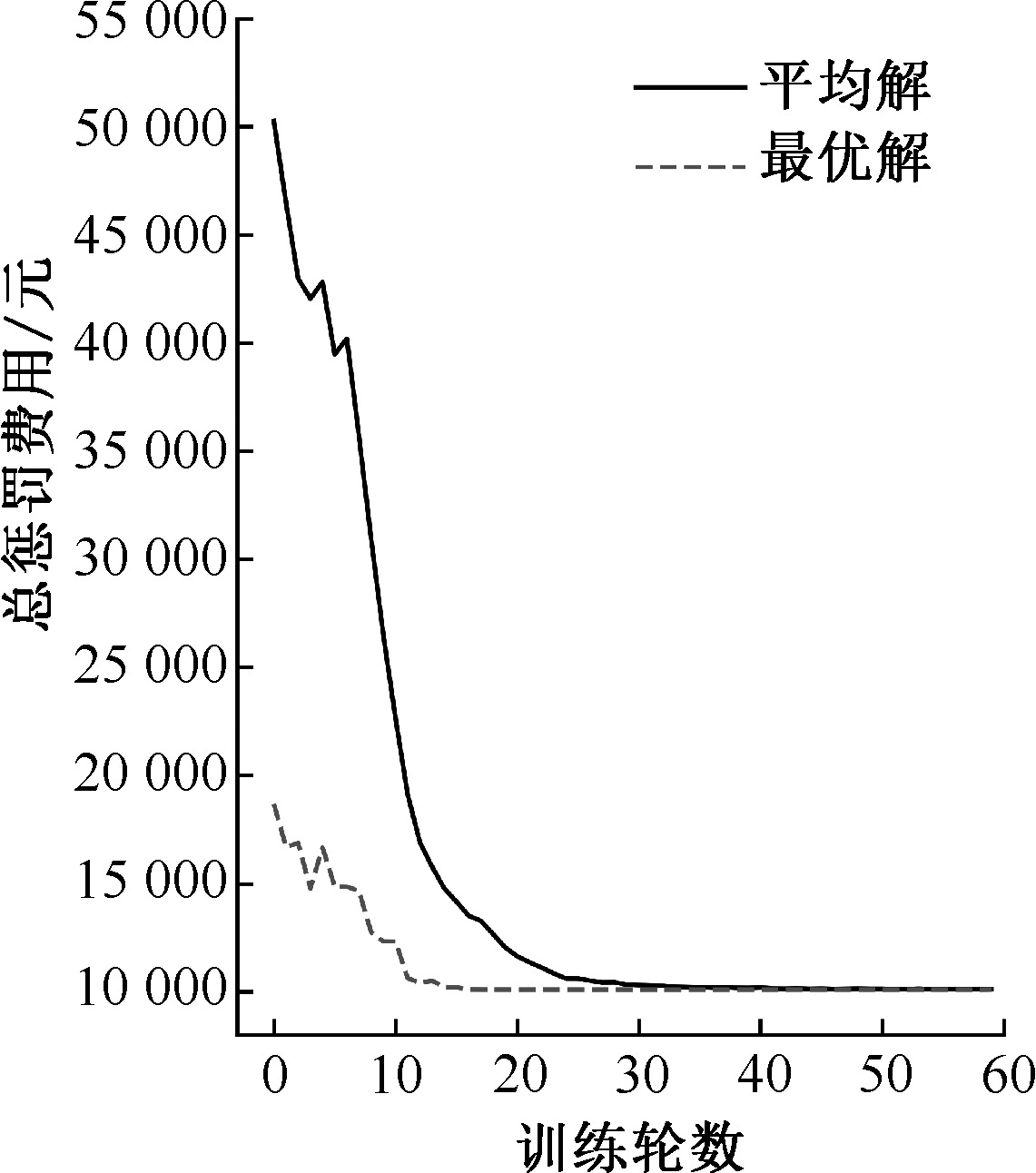
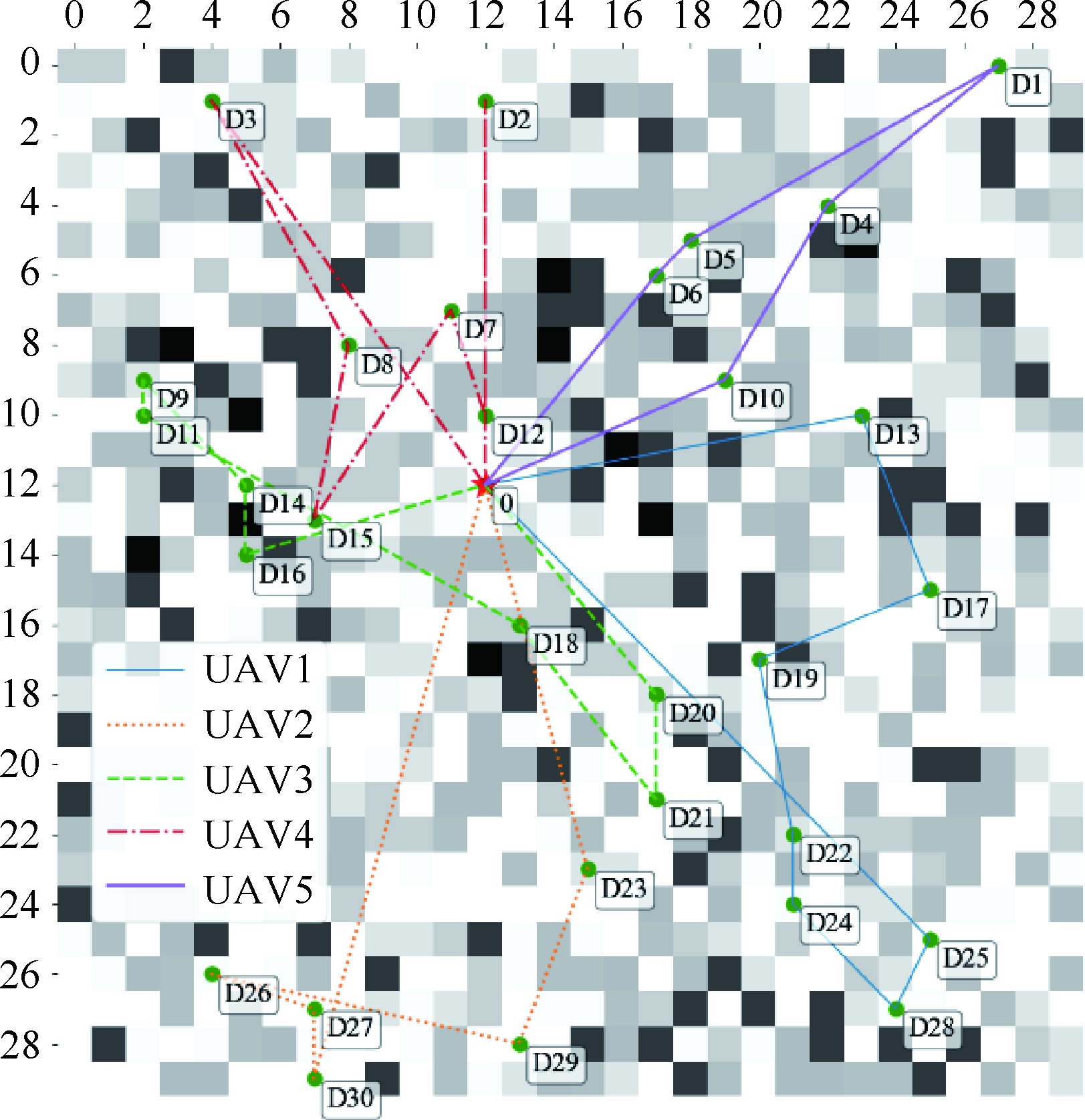
为优化物流无人机(UAV)的配送线路以及航迹协同规划,在地理信息系统(GIS)栅格化基础上,考虑调度中心、客户和地面遮蔽物的位置空间分布,以及它们的坠落代价差异,提出一种UAV配送线路以及航迹协同规划的双层规划模型;根据问题特征,设计一种基于深度强化学习(DRL)的2阶段混合算法,在第1阶段利用DRL算法生成多架UAV访问客户顺序的配送线路,再将A*算法嵌入其中,据此在第2阶段搜索每架UAV的可行最短航迹;结合算例,给出最佳UAV配送线路及其航迹方案,分析参数的变化对模型的影响,并与传统智能算法比较,验证所提模型的科学性和有效性。结果表明:对于6 km×6 km区域内30客户点规模的算例,设置人机的坠落代价阈值为1.4时,完成配送任务需要5架UAV,总飞行里程52.5 km;与多种传统智能算法相比,求解时间从少到多依次排名为DRL、遗传算法(GA)、差分进化算法(DE)和粒子群算法(PSO),在大规模算例上,DRL的规划结果UAV运行成本更低,其平均解和最差解远优于智能算法。
 京公网安备 11010502045206号
京公网安备 11010502045206号