中国安全科学学报 ›› 2024, Vol. 34 ›› Issue (8): 18-26.doi: 10.16265/j.cnki.issn1003-3033.2024.08.1290
席永涛1,2( ), 刘鹏杰2, 胡甚平1, 韩冰3
), 刘鹏杰2, 胡甚平1, 韩冰3
XI Yongtao1,2(), LIU Pengjie2, HU Shenping1, HAN Bing3
摘要:
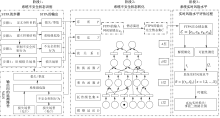
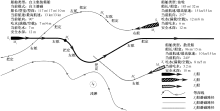
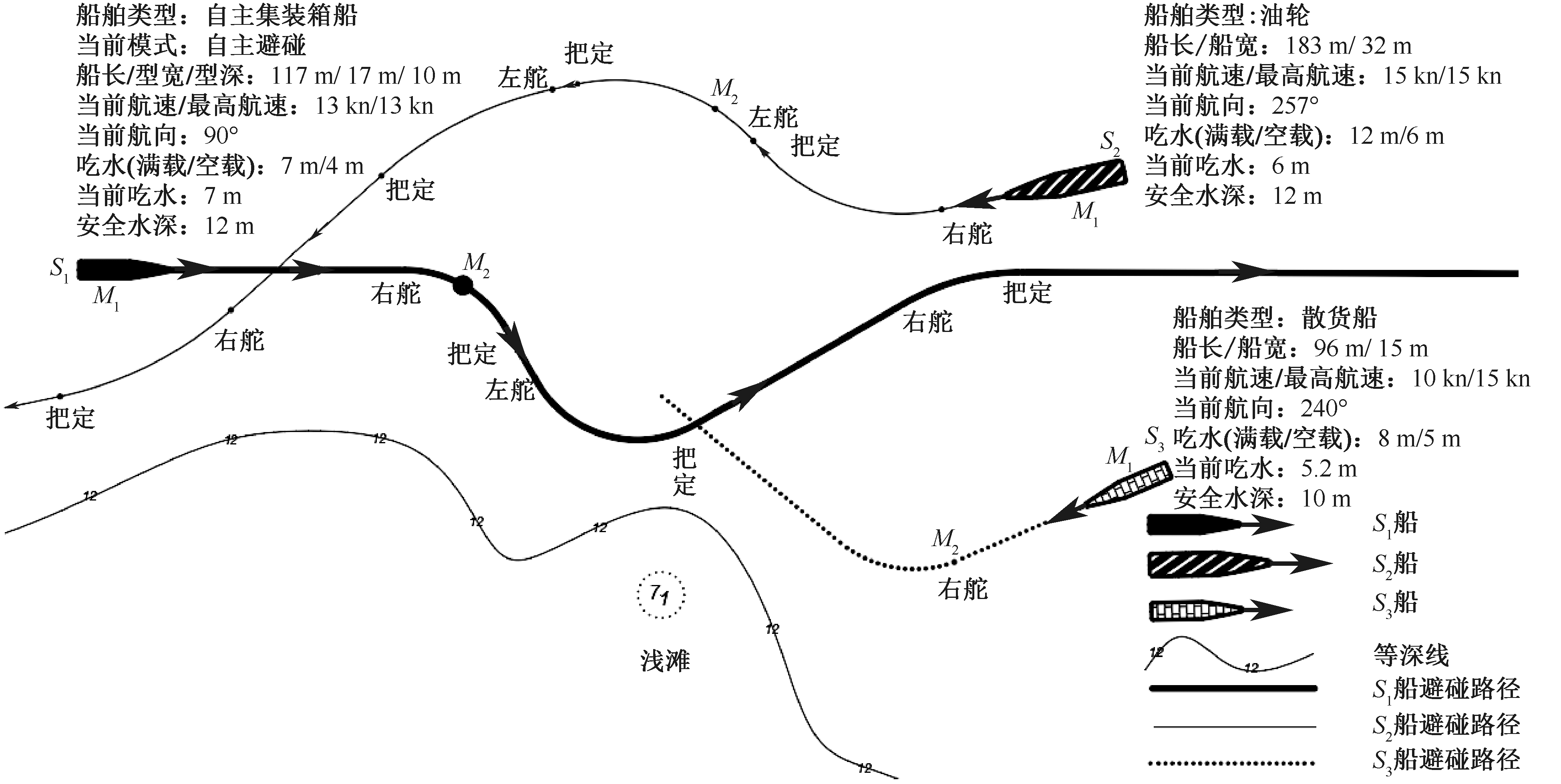
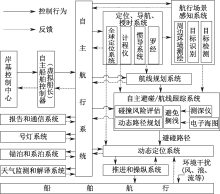
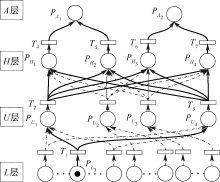
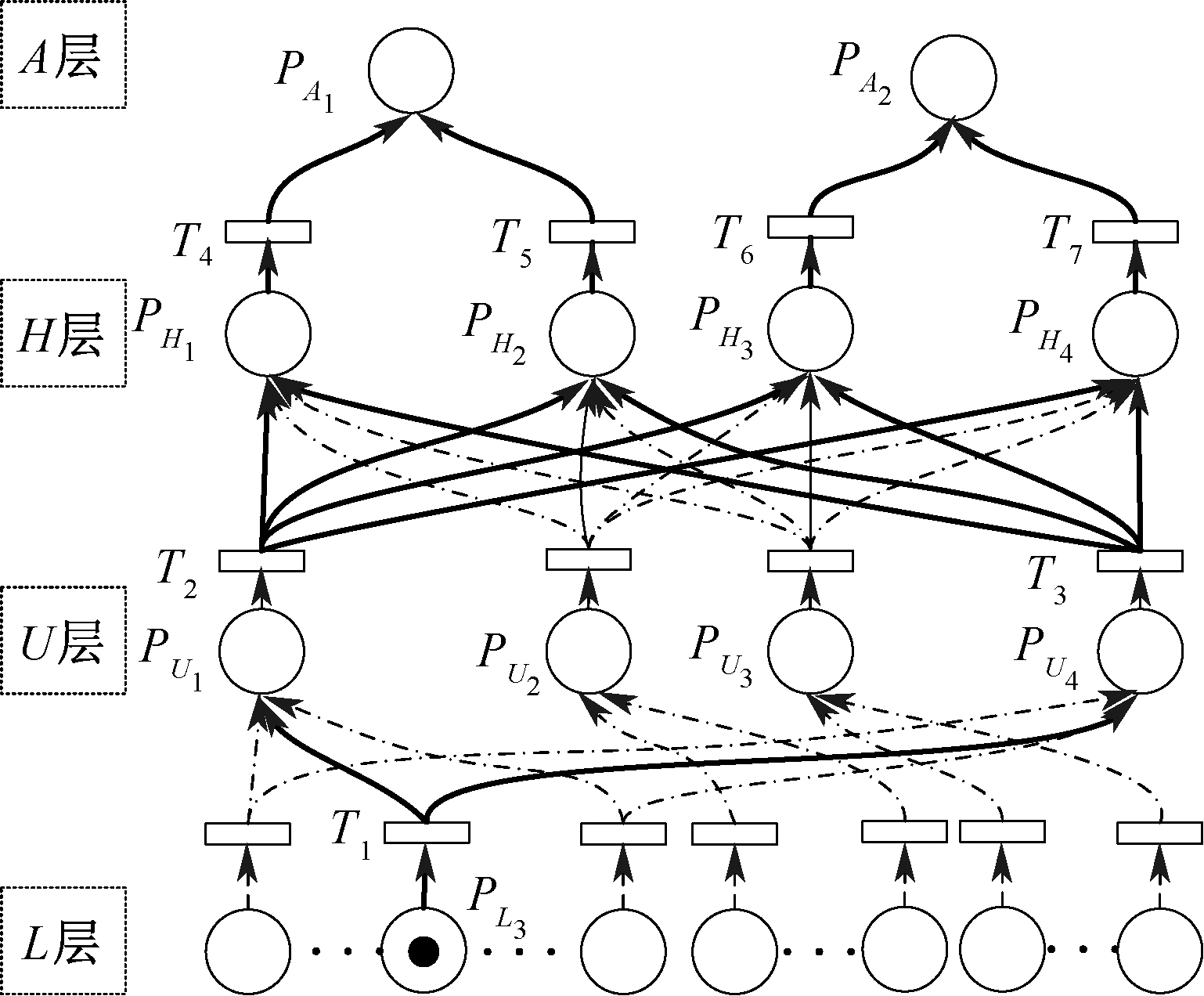
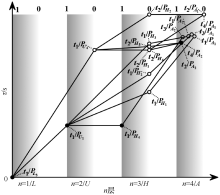
为实时监测海上自主水面船舶(MASS)航行过程风险,基于系统理论事故模型与过程(STAMP)建立MASS的安全控制结构,采用系统理论过程分析法(STPA)确定损失/事故和系统级危险,识别不安全控制行为并分析损失场景,构建系统状态转化过程模型;采用模糊时间Petri网(FTPN)建模,以设定的MASS航行场景得到相关模糊时间函数并推算FTPN的情态演进;引入新的风险水平表达式并通过系统实时损失/事故二维路径图来可视化系统的实时风险水平和系统不安全状态的转化路径。结果表明:设定的航行场景在当前时刻下,缺少安全水深输入、未更新避碰路径、航向航速不安全、搁浅是风险最高的系统不安全状态,并对应4条风险最高的转化路径;STPA驱动下的FTPN过程模型能全面评估MASS航行的实时风险水平,以系统实时损失/事故二维路径图作为可视化界面,用于监管MASS航行中不安全系统状态并描述其转化路径。
中图分类号:
 京公网安备 11010502045206号
京公网安备 11010502045206号