中国安全科学学报 ›› 2022, Vol. 32 ›› Issue (12): 150-157.doi: 10.16265/j.cnki.issn1003-3033.2022.12.2650
刘擎超1,2( ), 徐天宇1, 熊晓夏3, 赵晶娅1,4, 蔡英凤1
), 徐天宇1, 熊晓夏3, 赵晶娅1,4, 蔡英凤1
LIU Qingchao1,2(), XU Tianyu1, XIONG Xiaoxia3, ZHAO Jingya1,4, CAI Yingfeng1
摘要:
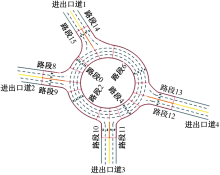
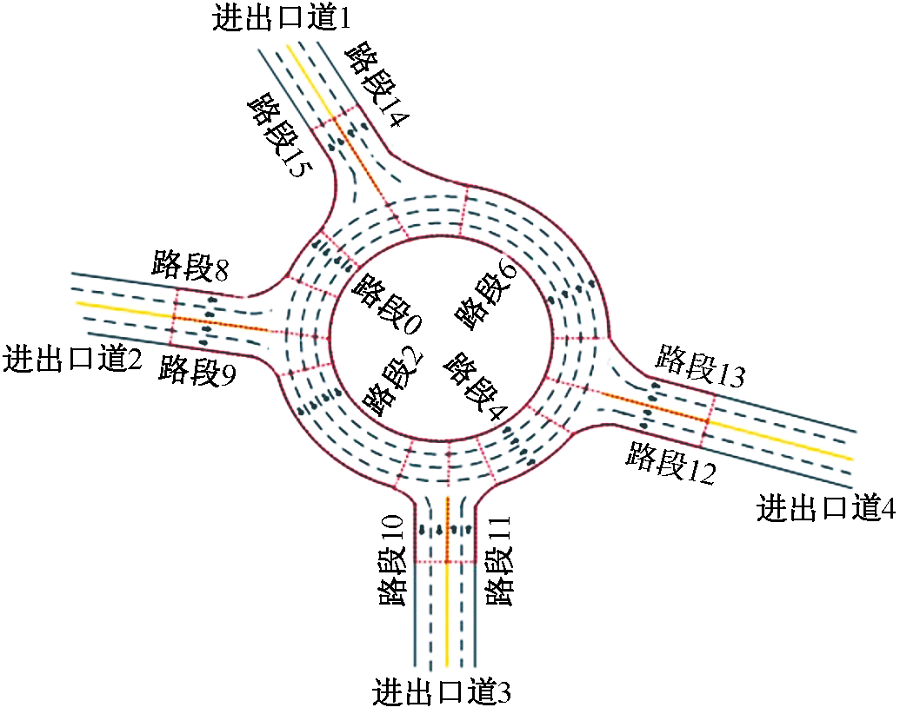
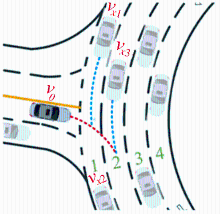
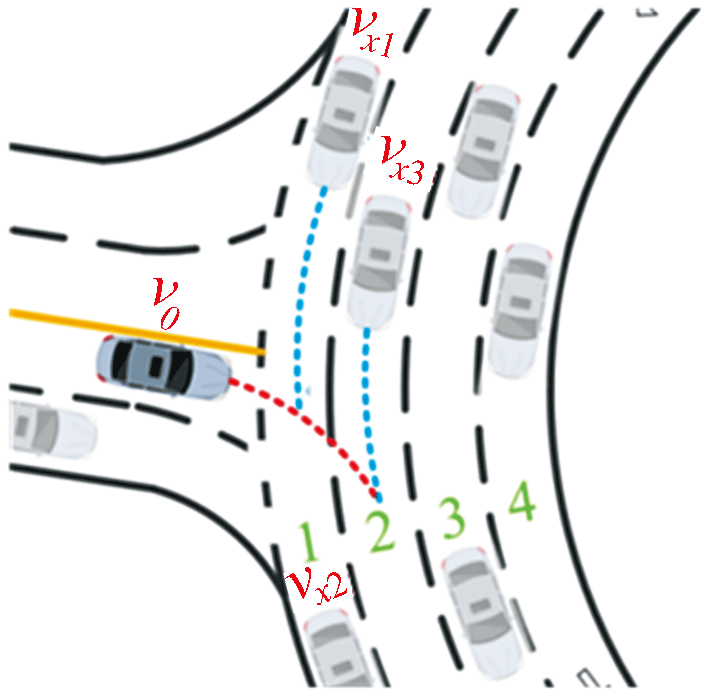
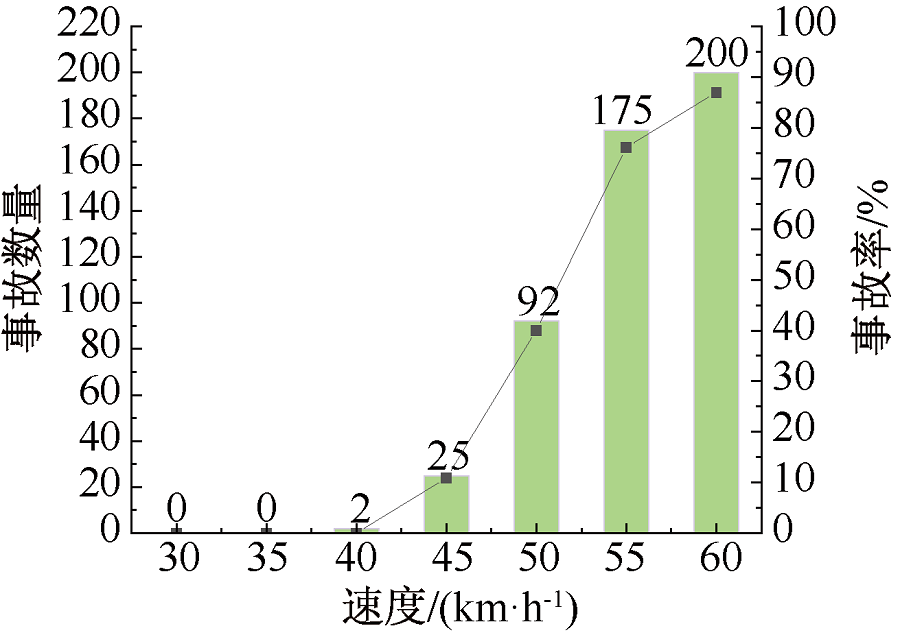
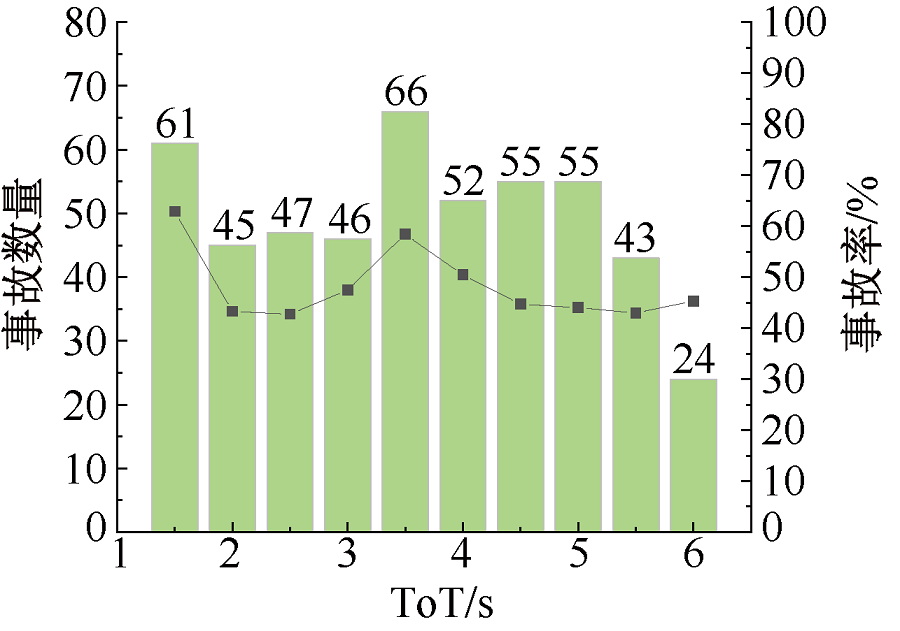
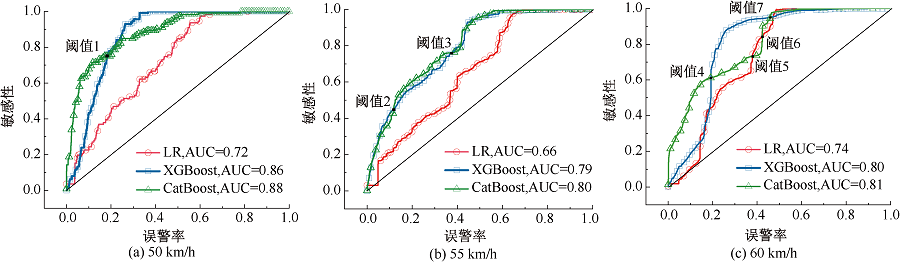
为降低城市环形交叉口事故发生率,针对交叉口智能汽车接管过程中的事故风险问题,提出智能汽车事故风险预测模型。基于城市交通仿真软件(ToT),构建城市环形交叉口场景,分析智能驾驶汽车接管过程的事故数据,揭示道路区域及接管时间对智能汽车接管过程事故风险的影响机制;使用CatBoost对事故风险进行建模,以敏感性分析、曲线下面积(AUC)为评价指标,对比CatBoost与线性回归、XGBoost模型的预测性能。结果表明:速度对事故的影响重要度占比在47%以上,交叉口入口道事故率最高,且入口左侧车道事故率较右侧车道平均高8.63%左右;ToT时间在环形交叉口对汽车事故率影响约为8.5%,且环道区域的道路曲率、半径因素对事故影响因素占比小于5%;环道路段几乎不影响自动驾驶汽车在车辆接管过程的碰撞,CatBoost模型预测精度高于线性回归及XGBoost。
 京公网安备 11010502045206号
京公网安备 11010502045206号