| [1] |
郁润, 张知田, 郭红领. 数据驱动的施工现场工人不安全行为管理方法[J]. 中国安全科学学报, 2019, 29(8):130-135.
doi: 10.16265/j.cnki.issn1003-3033.2019.08.021
|
|
Yu Run, Zhang Zhitian, Guo Hongling. A data-driven management approach of construction workers' unsafe behaviors[J]. China Safety Science Journal, 2019, 29(8): 130-135.
doi: 10.16265/j.cnki.issn1003-3033.2019.08.021
|
| [2] |
Fang Qi, Castro-Lacouture D, Li Chengqian. Smart safety: big data-enabled system for analysis and management of unsafe behavior by construction workers[J]. Journal of Management in Engineering, 2024, 40(1): DOI: 10.1061/JMENEA.MEENG-5498.
|
| [3] |
Jiang Weiguang, Ding Lieyun. Unsafe hoisting behavior recognition for tower crane based on transfer learning[J]. Automation in Construction, 2024, 160: DOI: 10.1016/j.autcon.2024.105299.
|
| [4] |
Ren Shaoqing, He Kaiming, Girshick R, et al. Faster R-CNN: towards real-time object detection with region proposal networks[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2016, 39(6): 1137-1149.
doi: 10.1109/TPAMI.2016.2577031
|
| [5] |
Redmon J, Divvala S, Girshick R, et al. You only look once: unified, real-time object detection[C]. Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, 2016: 779-788.
|
| [6] |
Liu Wei, Anguelov D, Erhan D, et al. SSD: single shot multibox detector[C]. Computer Vision-ECCV 2016. Springer International Publishing, 2016: 21-37.
|
| [7] |
王雪秋, 高焕兵, 郏泽萌. 改进YOLOv8的道路缺陷检测算法[J]. 计算机工程与应用, 2024, 60(17):179-190.
doi: 10.3778/j.issn.1002-8331.2404-0288
|
|
Wang Xueqiu, Gao Huanbing, Jia Zemeng. Improved road defect detection algorithm based on YOLOv8[J]. Computer Engineering and Applications, 2024, 60(17): 179-190.
doi: 10.3778/j.issn.1002-8331.2404-0288
|
| [8] |
纪执安, 周云奕, 张玉媛, 等. 基于改进YOLOv5的工业现场不安全行为检测[J]. 中国安全科学学报, 2024, 34(7):38-43.
doi: 10.16265/j.cnki.issn1003-3033.2024.07.2030
|
|
Ji Zhian, Zhou Yunyi, Zhang Yuyuan, et al. Industrial site unsafe behavior detection based on improved YOLOv5[J]. China Safety Science Journal, 2024, 34(7): 38-43.
doi: 10.16265/j.cnki.issn1003-3033.2024.07.2030
|
| [9] |
冯勇, 杨思卓, 徐红艳. 基于YOLOv8的轻量化安全帽佩戴检测算法[J]. 计算机应用, 2024, 44(增刊2):251-256.
|
|
Feng Yong, Yang Sizhuo, Xu Hongyan. Lightweight safety helmet wearing detection algorithm based on YOLO v8[J]. Journal of Computer Applications, 2024, 44(S2): 251-256.
|
| [10] |
张磊, 李熙尉, 燕倩如, 等. 基于改进YOLOv5s的综采工作面人员检测算法[J]. 中国安全科学学报, 2023, 33(7):82-89.
doi: 10.16265/j.cnki.issn1003-3033.2023.07.2226
|
|
Zhang Lei, Li Xiwei, Yan Qianru, et al. Personnel detection algorithm in fully mechanized coal face based on improved YOLOv5s[J]. China Safety Science Journal, 2023, 33(7): 82-89.
doi: 10.16265/j.cnki.issn1003-3033.2023.07.2226
|
| [11] |
徐壮, 钱育蓉, 颜丰. GCW-YOLOv8n:轻量级安全帽佩戴检测算法[J]. 计算机工程与应用, 2025, 61(3):144-154.
doi: 10.3778/j.issn.1002-8331.2409-0334
|
|
Xu Zhuang, Qian Yurong, Yan Feng. GCW-YOLOv8n: lightweight safety helmet wearing detection algorithm[J]. Computer Engineering and Applications, 2025, 61(3): 144-154.
doi: 10.3778/j.issn.1002-8331.2409-0334
|
| [12] |
高立鹏, 周孟然, 胡锋, 等. 基于REIW-YOLOv10n的井下安全帽小目标检测算法[J]. 煤炭科学技术, 2025, 53(增刊2):417-429.
|
|
Gao Lipeng, Zhou Mengran, Hu Feng, et al. Small target detection algorithm for underground helmet based on REIW-YOLOv10n[J]. Coal Science and Technology, 2024, 53(S2): 417-429.
|
| [13] |
郑海洋, 宋纯贺, 武婷婷, 等. 面向绝缘手套佩戴状况检测的小目标检测与匹配算法[J]. 小型微型计算机系统, 2023, 44(9):1989-1995.
|
|
Zheng Haiyang, Song Chunhe, Wu Tingting, et al. Small target detection and matching algorithm for wearing condition detection of insulating gloves[J]. Journal of Chinese Computer Systems, 2023, 44(9): 1989-1995.
|
| [14] |
Tang Chaoli, Dong Huiyuan, Huang Yourui, et al. Foreign object detection for transmission lines based on Swin Transformer V2 and YOLOX[J]. The Visual Computer, 2024, 40(5): 3003-3021.
doi: 10.1007/s00371-023-03004-8
|
| [15] |
Wang Shanshan, Tan Weiwei, Yang Tengfei, et al. High-Voltage transmission line foreign object and power component defect detection based on improved YOLOv5[J]. Journal of Electrical Engineering & Technology, 2024, 19(1): 851-866.
|
| [16] |
Chi T S, Ab Wahab M N, Mohamed A S A, et al. Enhancing EfficientNet-YOLOv4 for integrated circuit detection on printed circuit board (PCB)[J]. IEEE Access, 2024, 12: 25 066-25 078.
|
| [17] |
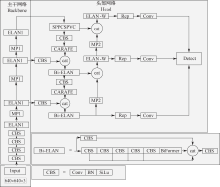
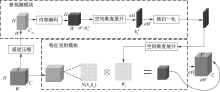
Wang Chienyao, Bochkovskiy A, Liao Hongyuan Mark. YOLov7: Trainable bag-of-freebies sets new state-of-the-art for real-time object detectors[C]. Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2023: 7464-7475.
|
| [18] |
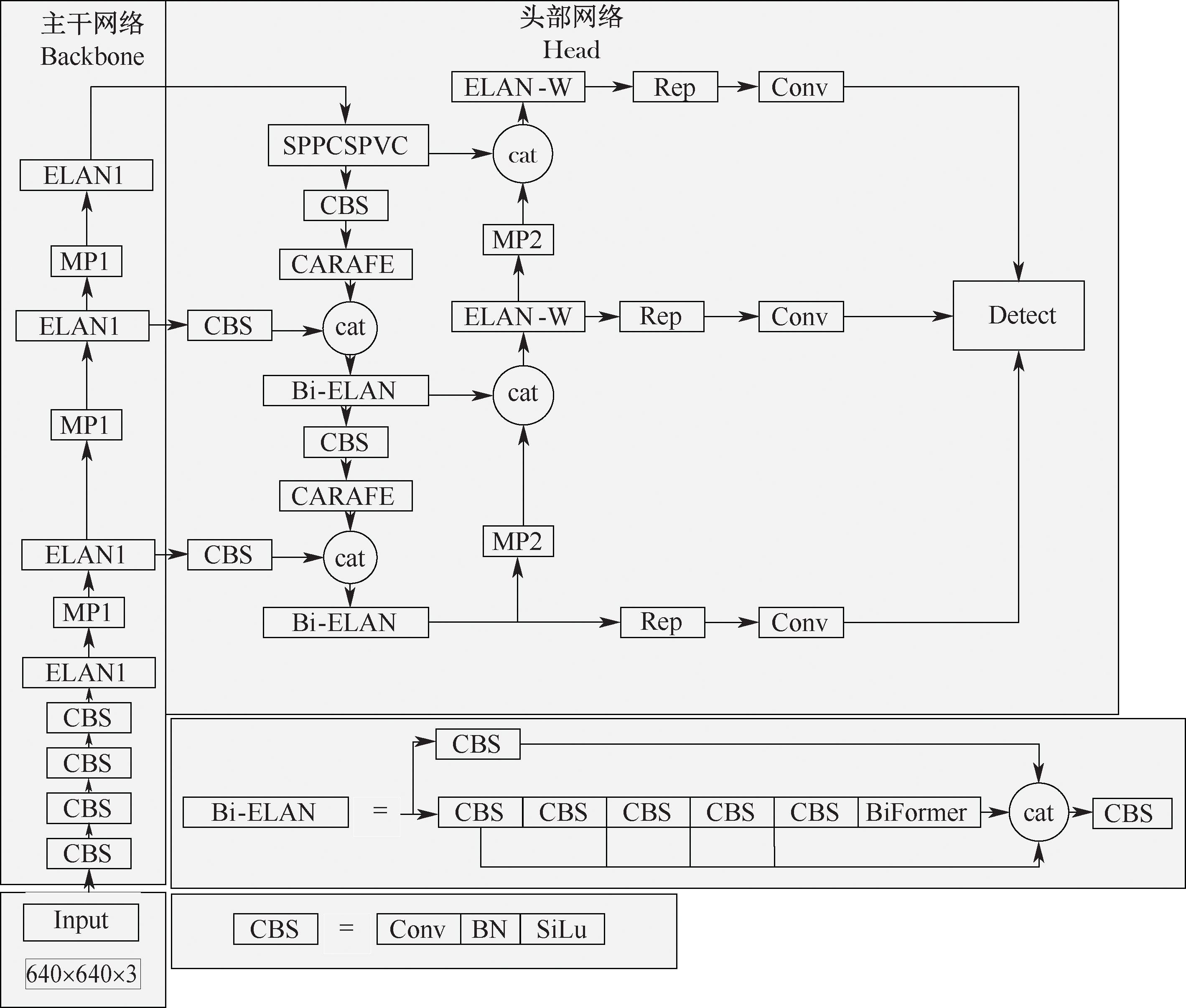
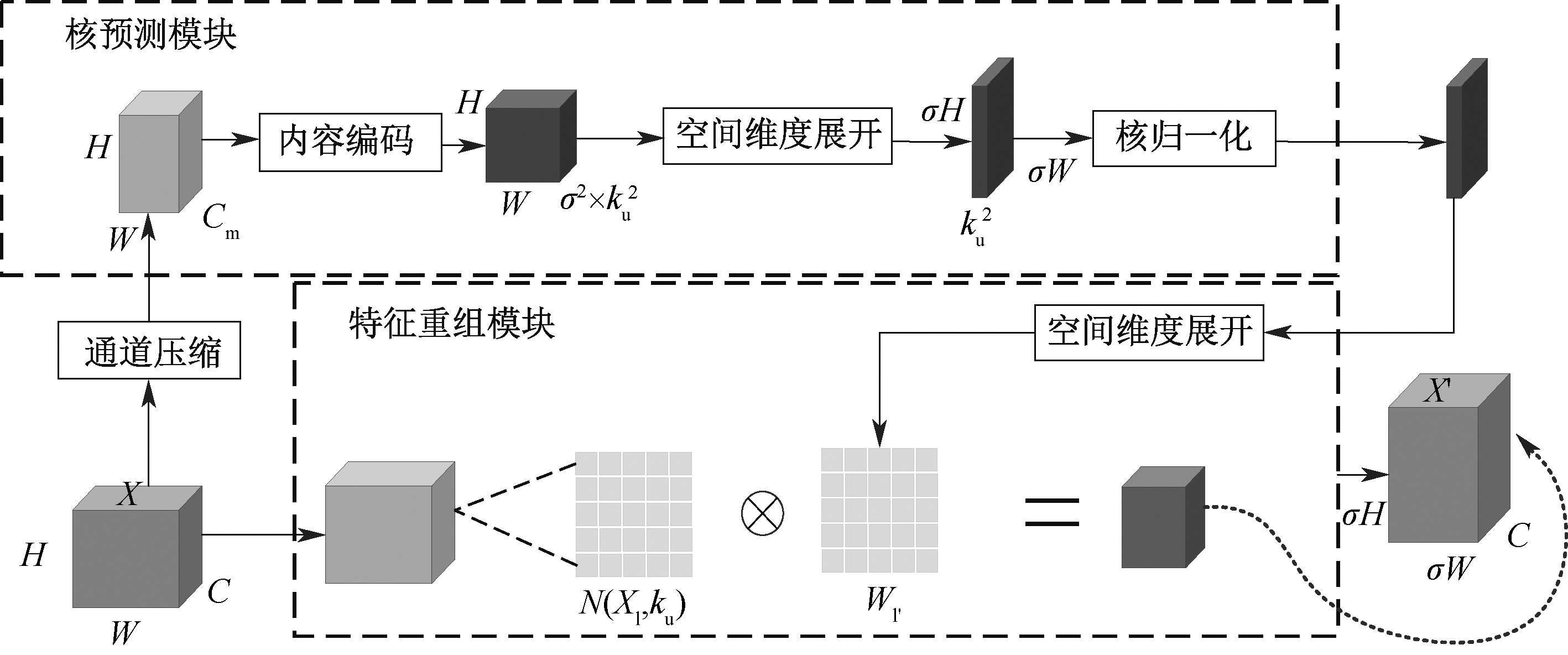
Wang Jiaqi, Chen Kai, Xu Rui, et al. Carafe: content-aware reassembly of features[C]. Proceedings of the IEEE/CVF International Conference on Computer Vision, 2019: 3007-3016.
|
| [19] |
Zhu Lei, Wang Xinjiang, Ke Zhanghan, et al. Biformer: vision transformer with bi-level routing attention[C]. Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2023: 10 323-10 333.
|
| [20] |
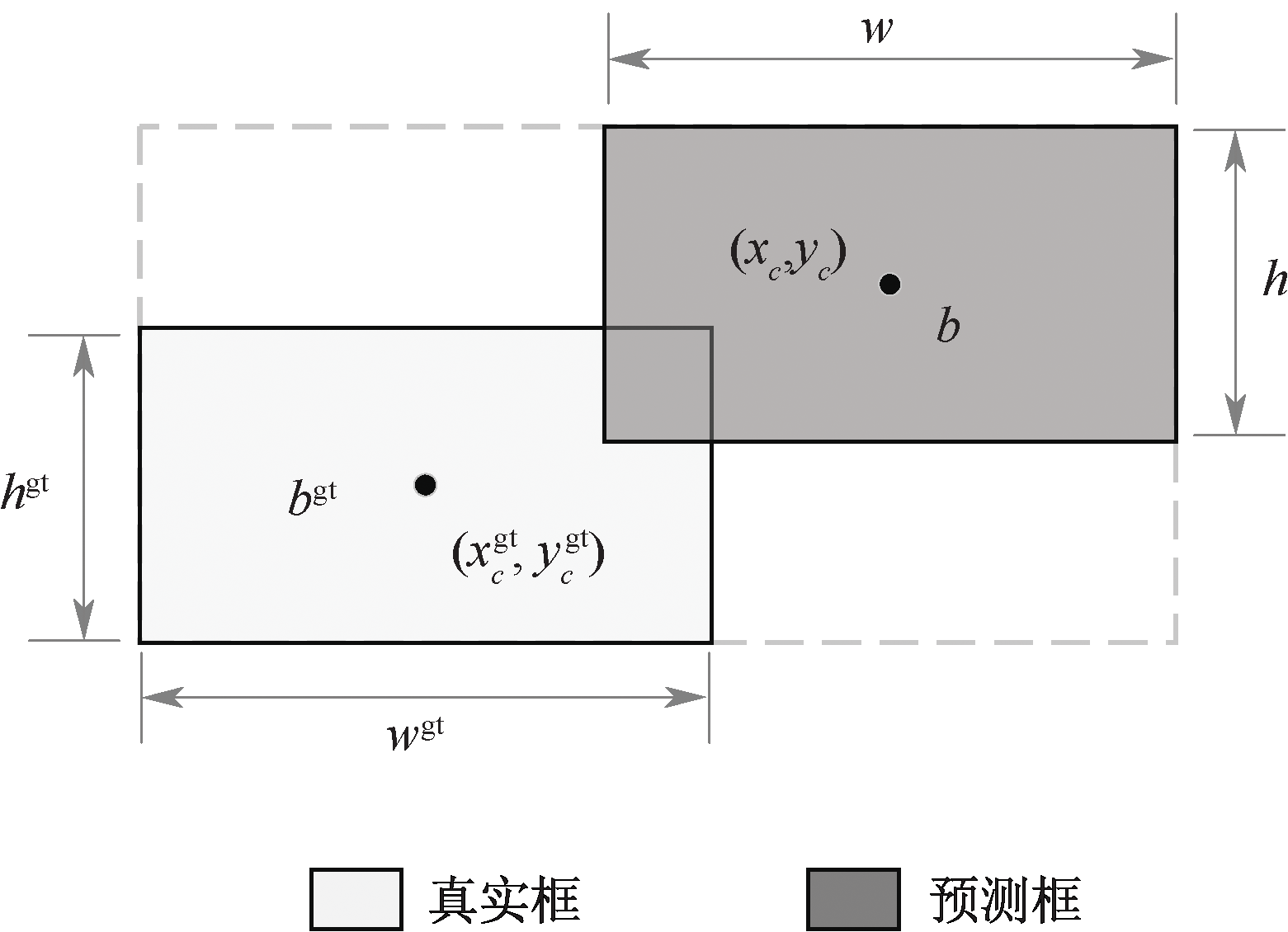
Zhang Hao, Zhang Shuaijie. Shape-iou: more accurate metric considering bounding box shape and scale[J]. arXiv Preprint arXiv, 2023:DOI: 10.48550/arXiv.2312.17663.
|

 ), 吴鑫1,2, 陈洁1,**(
), 吴鑫1,2, 陈洁1,**( 京公网安备 11010502045206号
京公网安备 11010502045206号